I want to add a force sensor to my robot but I failed.
I followed this tutorial.
And, I got this error:
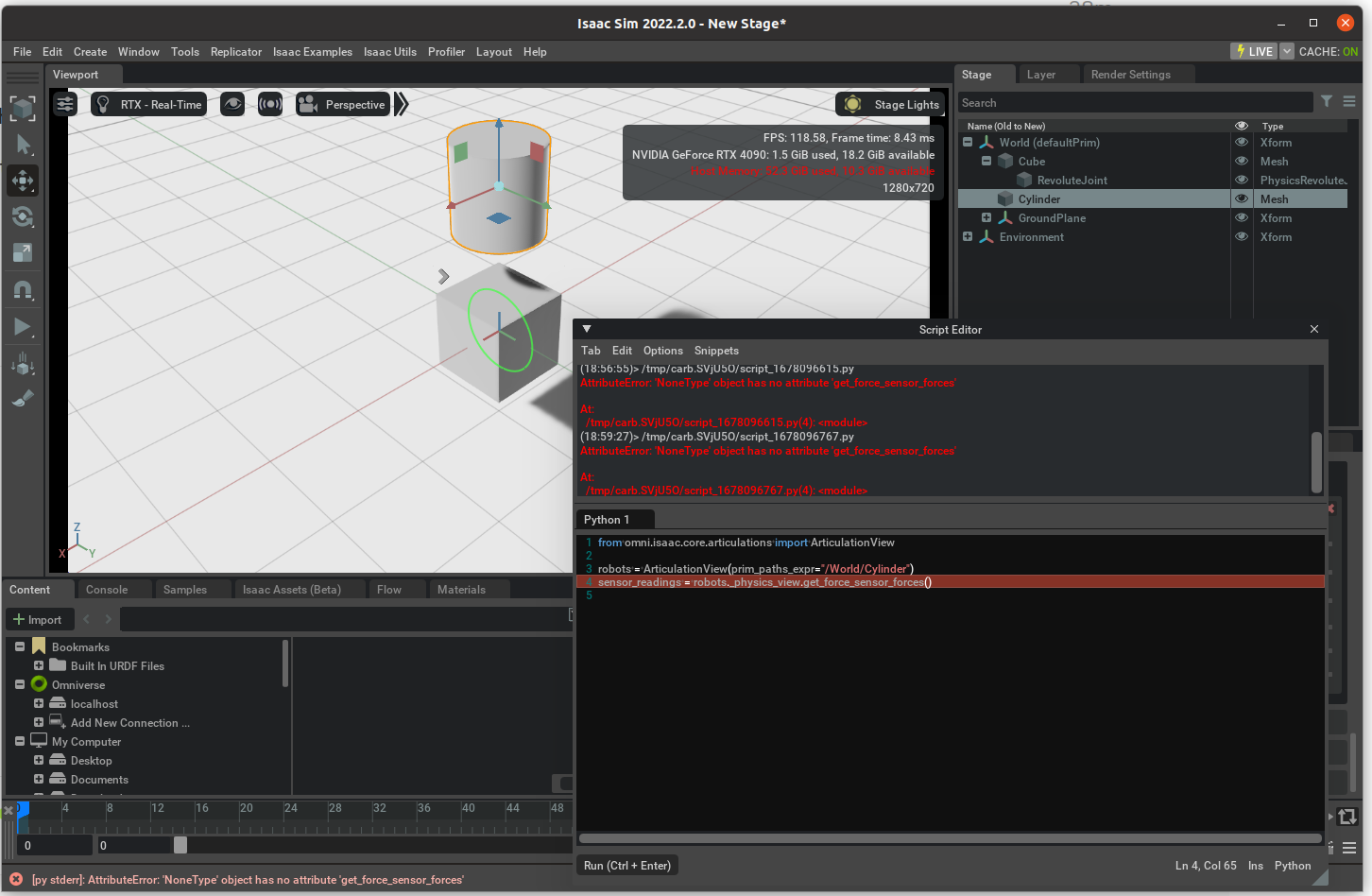
What should I do?
Thank you.
I want to add a force sensor to my robot but I failed.
I followed this tutorial.
And, I got this error:
What should I do?
Thank you.
We are looking in to how this is broken. For now, if you do
for x in dir(robots):
print(x)
Maybe you will see a get funciton that works for you? Maybe robots.get_applied_joint_efforts() ?
Hi @berternats - New APIs for force sensors are currently being worked on and will be available in the future releases.
Meanwhile, suggestion is to use the contact sensors for your use case.
Here are the documentation links:
https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/isaac_sim_sensors_physics_based_contact.html
standalone_examples/api/omni.isaac.sensor/contact_sensor.py
I see, thank you so much.
This topic was automatically closed 14 days after the last reply. New replies are no longer allowed.