Please provide complete information as applicable to your setup.
**• Hardware Platform (Jetson / GPU)**TX2 • DeepStream Version5.0.1
**• JetPack Version (valid for Jetson only)**4.4 • TensorRT Version7 • NVIDIA GPU Driver Version (valid for GPU only) • Issue Type( questions, new requirements, bugs) • How to reproduce the issue ? (This is for bugs. Including which sample app is using, the configuration files content, the command line used and other details for reproducing) • Requirement details( This is for new requirement. Including the module name-for which plugin or for which sample application, the function description)
Hi Joaquin
First of all, great work!
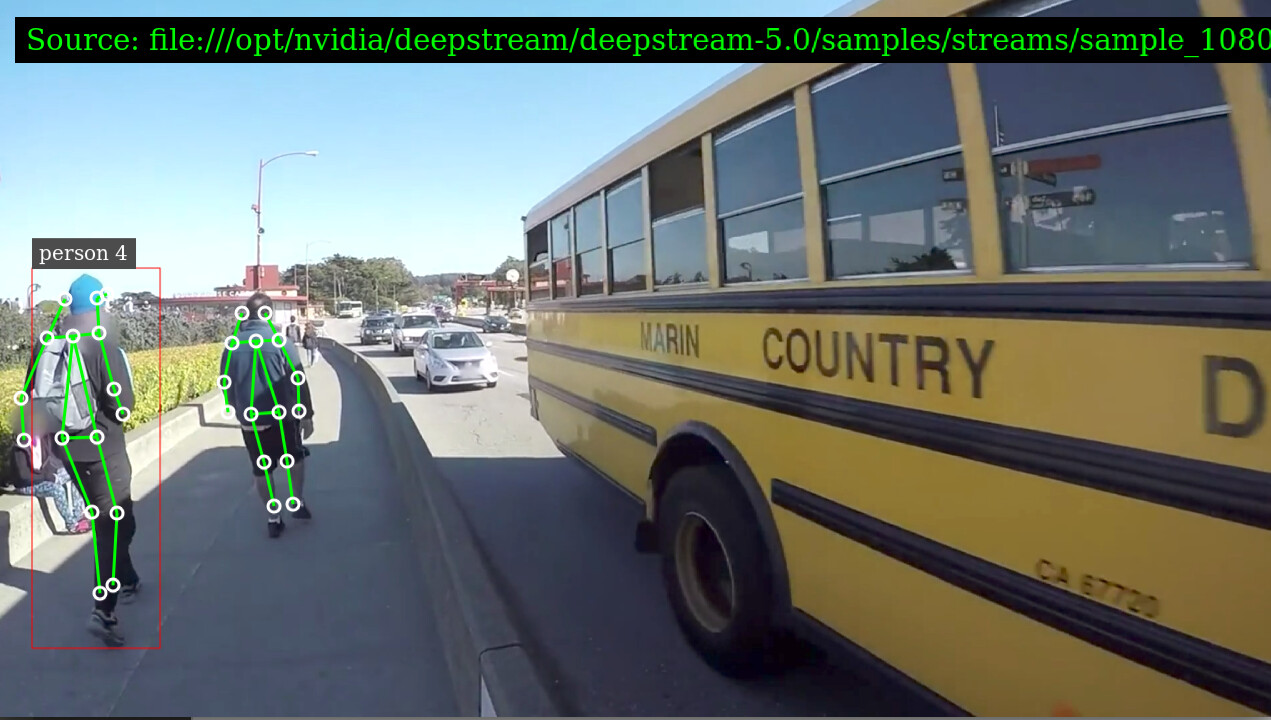
I’ve integrated pose estimation module as primary or second GIE detector successfully based on your recent work. Only has a small issue found. When in tiled display mode, the lines are correct but circles are in wrong places and scale. The
circles displayed as if they are in single channel mode. When you pick a single window, everything is correct. You can see two screen shots demonstrate this issue.
@AndySimcoe That’s an interesting issue, I think I might have an idea towards fixing it. Would you feel comfortable sharing your merged source code with DeepStream app on GitHub or something?
In deepstream-app main(), I add a probe at the src pad of secondary gie since I use primary gie with a yolo detector:
GstPad *src_pad = NULL;
GstElement *pose = appCtx[i]->pipeline.common_elements.secondary_gie_bin.sub_bins[0].secondary_gie;
src_pad = gst_element_get_static_pad (pose, "src");
if (!src_pad)
g_print ("Unable to get primary_gie src pad\n");
else
{
gst_pad_add_probe(src_pad, GST_PAD_PROBE_TYPE_BUFFER,
pgie_src_pad_buffer_probe, NULL, NULL);
gst_object_unref (src_pad);
}
In this probe function, I use a function – “pose_meta_data()” to deal with pose estimation meta data which I put it into another cpp source file named pose_meta.cpp:
static GstPadProbeReturn
Hey, thanks, would you mind to share the whole directory and files with us, so I don’t need to handle the build error and save our time to fix the issue?
Hi, my codebase has integrated some other modules which have dependencies. I’ll compose a simple clean deepstream-app specifically for this issue and share the links later.
Hi, I just built a demo unit of deepstream-app based on your pose estimation code to demonstrate this issue. I’ve tried to upload an engine for 4 video stream with the source code for your convenience as well but unsuccessfully --maybe due to the file uploading size restriction?
Just go to the deepstream-app folder and execute the command: ./deepstream-app -c deepstream_app_config_pose.txt.
Thanks for you report the issue.
I can repro your issue locally, and the current tiler cannot work well with Circle, and we will add the feature in later DS release.
Your app looks really great!
I’m newbie in Deepstream and I don’t know how to custom parse pose function like in /opt/nvidia/deepstream/deepstream-5.0/sources/objectDetector_SSD. I see just have sample for object detection and classification. Can you help me? Thanks so much!