Hello guys,
Here’s the setup I experimented ISAAC Visual Slam on.
- Xavier AGX (Jetpack 5.0.2)
- Ubuntu 20.04
- ROS Foxy
- ISAAC Visual Slam DP 1.1 (installed from source)
- Having localization_n_mapping set to true, I suddenly get an error that looks like: [Timestamp] Error addr X. What does this error mean/what causes it? These errors are printed randomly without affecting the flow of mapping/vo.
-
When the camera_link tf gets sudden jumps (cause by incorrect localization - 2-3 meters high) and I try to do the localization in a known point (by using visual_slam/load_map_and_localize service on a stored map), in console it shows that the localization was done successfully (and it prints the right coordinates). At the same time, nothing happens and an error is also printed: poseGraph->Reindex() failed. What exactly causes this error? Any fix for this?
If elbrus is reset first (by using visual_slam/reset service) and I do the exact same steps, I will get the expected behavior: load map and localize successfully. -
If the camera is not perpendicular to the ground, what’s the correct way to set the gravitational_force vector on launch? Here’s how the parameters were set for VIO tests (with camera slightly pointing to the ground):
'enable_imu': True,
'map_frame': 'map',
'odom_frame': 'odom',
'base_frame': 'camera_link',
'input_left_camera_frame': 'camera_infra1_frame',
'input_right_camera_frame': 'camera_infra2_frame',
'input_imu_frame': 'camera_imu_optical_frame',
'path_max_size': 5000,
'gravitational_force': [0.8429, 6.0940, 8.5260]
And also here’s how the gravitational vector looks like:
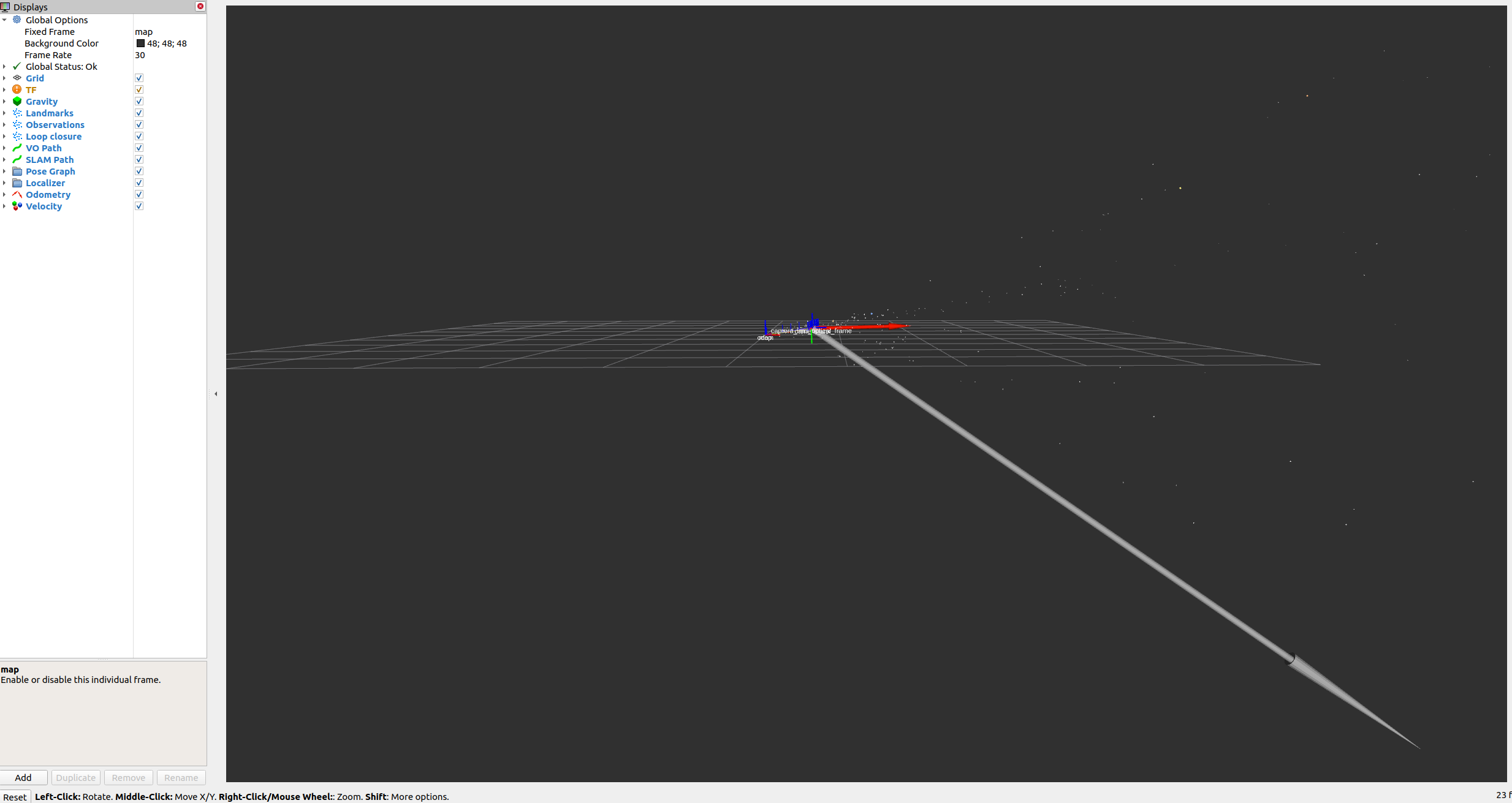
Is that the expected behavior for the gravity vector?
- Considering that the screenshot above illustrates the expected behavior, how can the gravitational vector be used to determine the real orientation of the camera_link (if the camera points to the ground, the camera_link tf should do the same) ?
Thank you and have a nice day!