Description:
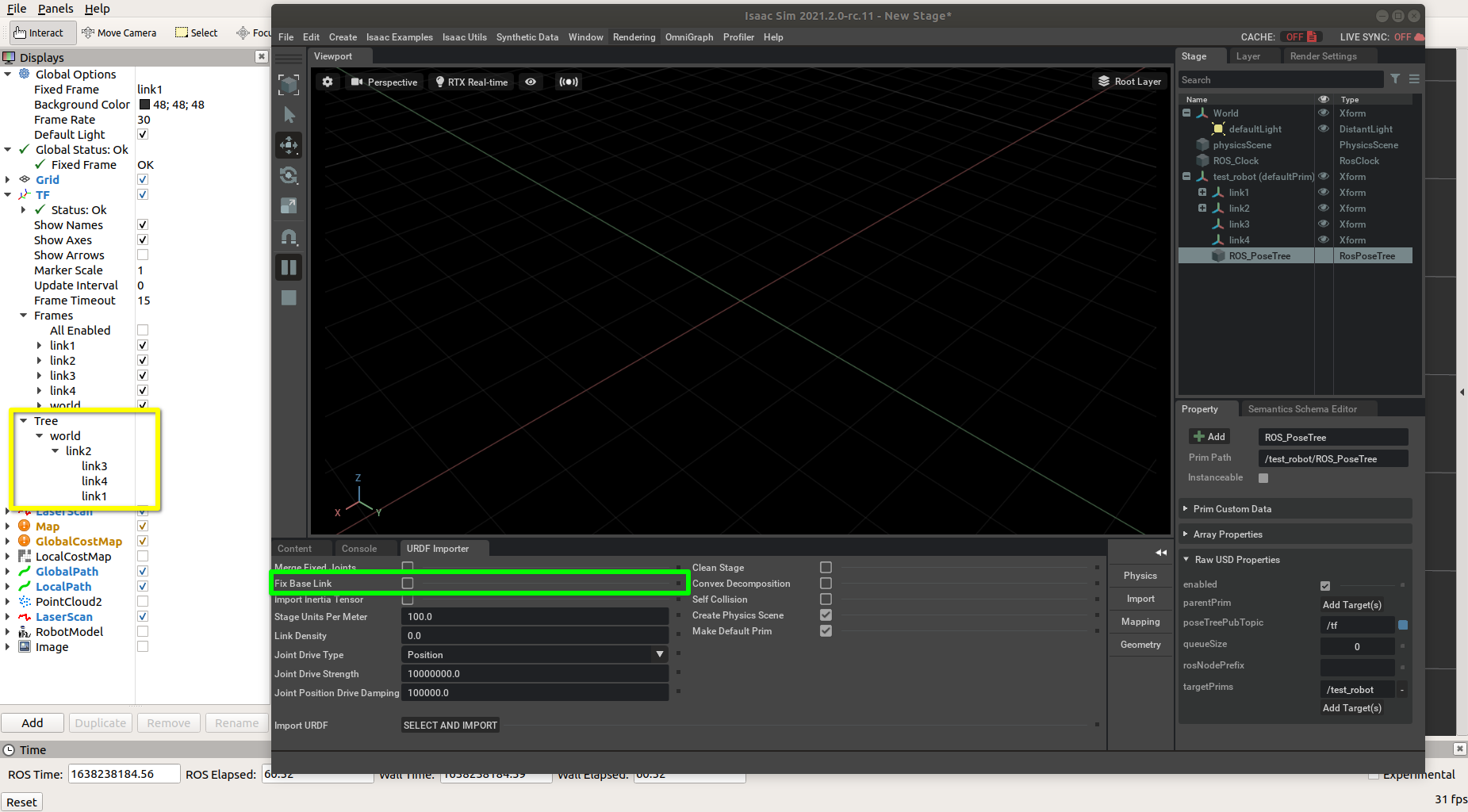
The pdf file states the relation of urdf. The png file is the result captured from omniverse and rviz(visualization software of ROS), the yellow box shows the tf tree read by ROS.
I used isaac sim with ROS and found that the first two links are reversed. I tested this issue with three cases: Single_branch, two_branch, and y_branch. In the file y_branch_fail.png, it shows that link2 is the child of world (highlighted in yellow) while in the file y_branch_fail.urdf link1 is the child of world and link2 is the child of link1 (highlighted in yellow).
We filed a bug for it. But for now, you can fix it by manually change where you put the articulation root. When you imported it through the urdf importer, it automatically added an “articulation root” on the main robot prim, and that’s causing issues. You can delete the articulation root from your “test_robot” prim, and then add one to your link 1.
Select test_robot (or whatever your robot’s name is) on the stage tree, go to the property tab, find the “Articulation Root” section, and delete it by click on the x.
Select link 1, go to the property tab, click on the the +Add button and select Phyics->Articulation Root