Hi, I tried to load kinova jaco arm directly from the code but failed:
It showed that:
.obj references material not found in .mtl library, material_0
I tried to fix this bug by changing material_0 to None in mtl files but the issue still remained to be the same.
Can you solve it?
Thank you
I have solved this problem by importing obj with dae files by myself.
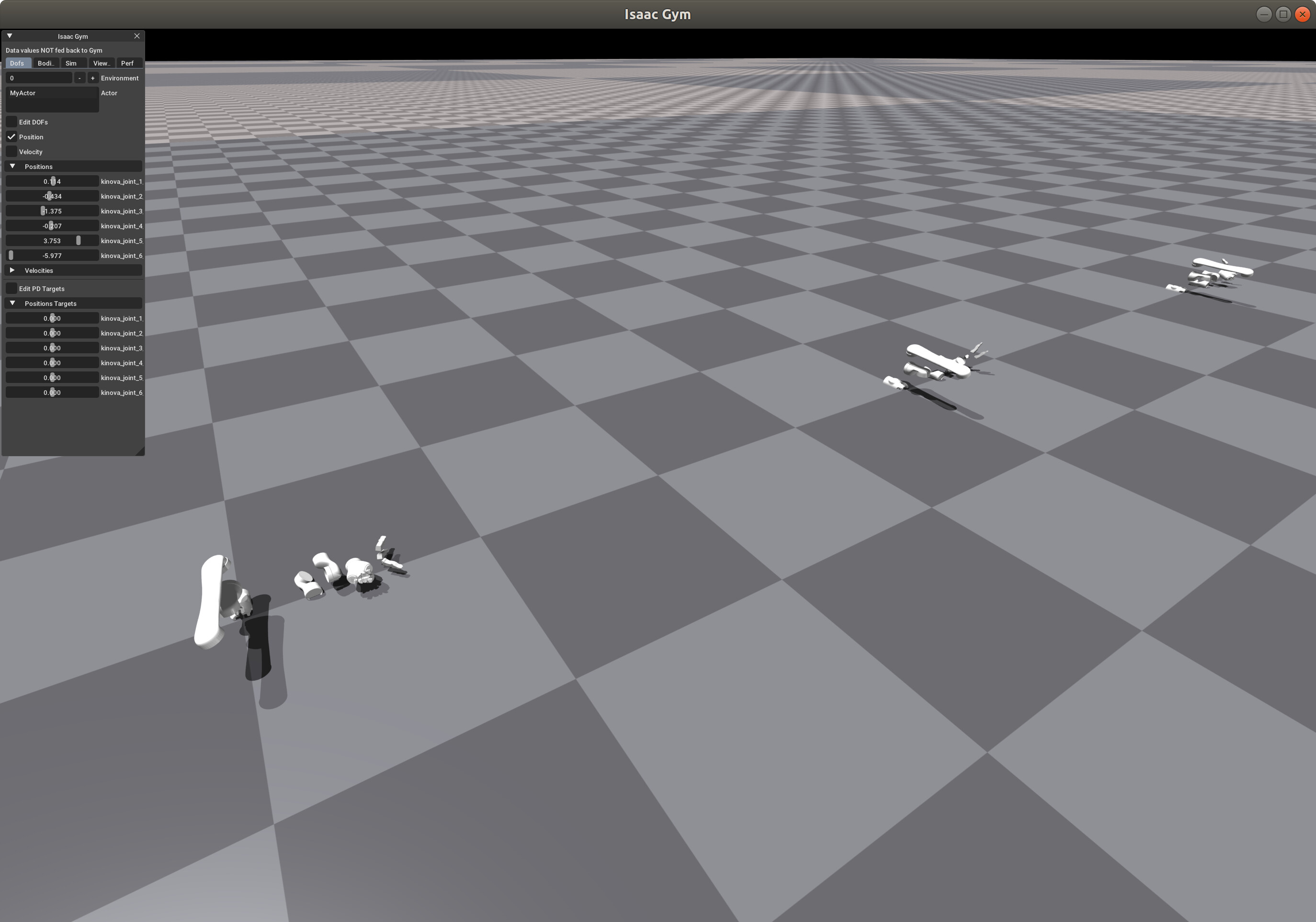
Hi Floodsung!
Glad to know you solved the problem and thanks for using Isaac Gym! Maybe in the future, it could be useful for you to know the alternative solution. What is shown on your screenshot can happen when robot visual meshes have a different orientation, compared to the expected by default, and should be rotated by 180 degrees. We have the asset option responsible for this turn: asset_options.flip_visual_attachments. Setting it True if it was False or vice versa could solve your problem as well.