I am seeing unexpected large velocity spikes on published joint states, for wheeled robots. This is happening on the Mecanum-wheeled robot I am developing, but also on Carter which I pulled out of the ROS Navigation demo scene.
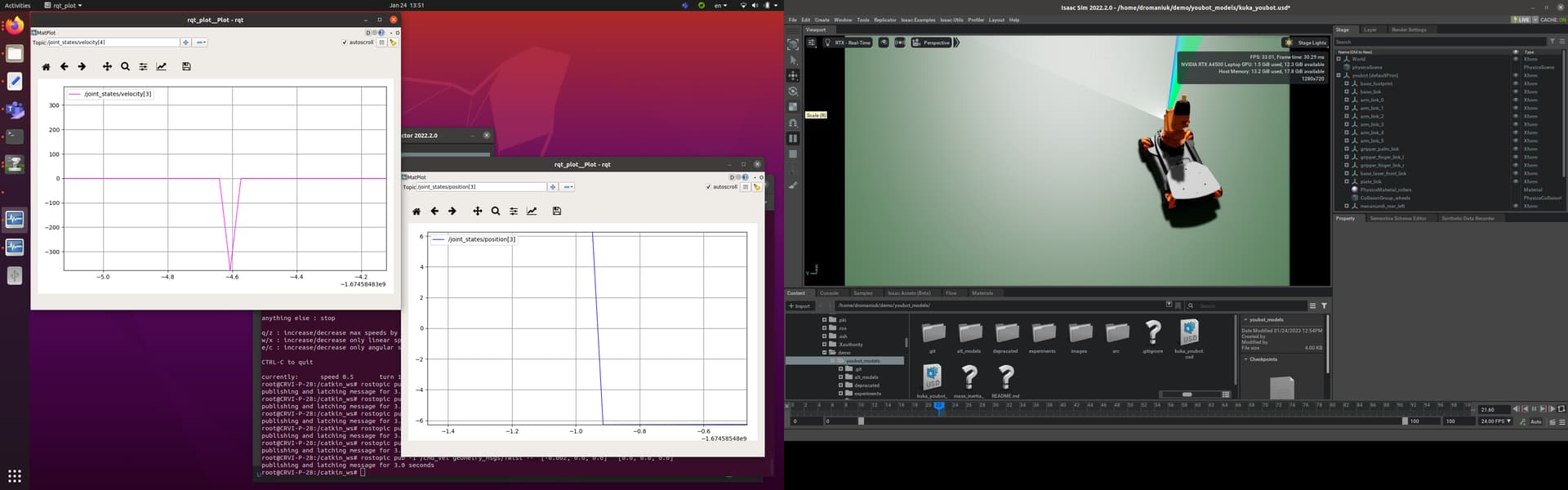
I noticed is that the joint positions published are cycling from -2pi to +2pi. I would have expected 0 to +2pi, or perhaps -pi to +pi. That is a minor issue which I can work around. But it turns out these velocity spikes are happening precisely when the position jumps from -2pi to +2pi.
I have attached a minimal USD file to reproduce the problem - I disconnected the Articulation Controller and I am driving the wheels by setting joint velocities. Also a screenshot showing the spikes.

carter_ros.usd (1.8 MB)