I was trying to practice this tutorial and got stuck at a point where I created the omni-graph as instructed.
And then it appears that the ROS1 Subscribe Twist Node isn’t working. I got the roscore started and running and published velocity commands. And then, I also double-checked if it is getting published.
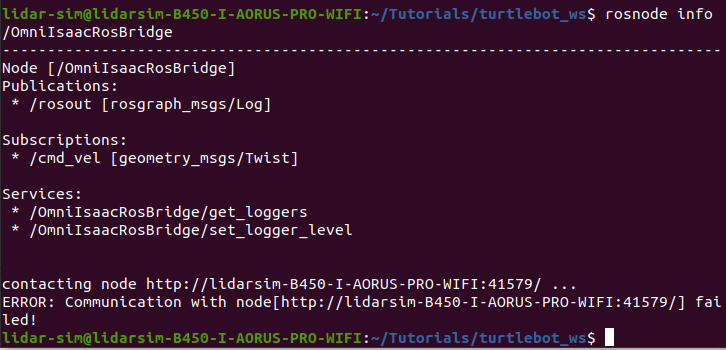
And the info about the node subscribing to the topic is attached.
I am stuck at the same problem. I cannot move Turtlebot3. If I do “rosnode info /OmniIssacRosBridge”, I get the same error msg as shown above. Did anyone figure out how to fix this problem ?