Hello, I am working on Isaac Sim to adapt it to legged robotics.
So far as I know, it seems that the ROS2 Subscribe Joint State node cannot receive JointState.efforts msg.
(As described in 8. ROS2 Joint Control: Extension Python Scripting — Omniverse Robotics documentation)
When I sent JointSpace.effort type message in the above example, it showed an error like the below picture.
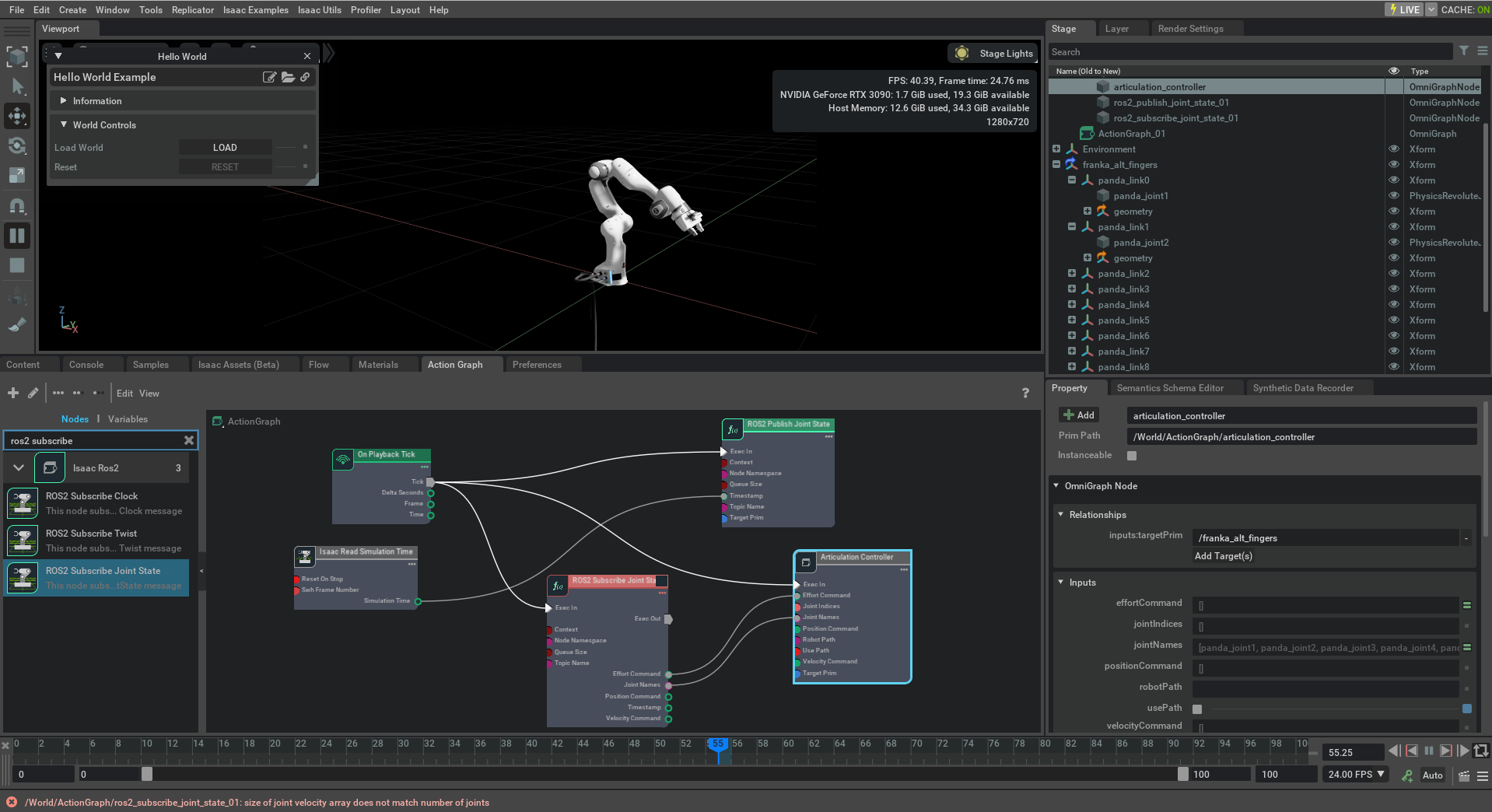
It seems a bit strange as it works well with the position or velocity commands, and even the effort command already exists in the node options.
I wonder whether I am doing something wrong or if the feature will be added in the next release.
Thanks in advance.