Hai Sir,
-
Can ./imagenet (imagenet.cpp) /dev/video0 be used for live detection (when implemented outside jetson-inference directory) where the contents are same as in imagenet.cpp fiel along with CMakelist.txt file?
P.S: My idea is to do the kind of my-recognition code or the imagenet.cpp to the live camera feed, instead of only calling up single images like, polar.jpg etc. -
Is it possible to implement the image detection and object detection in C language , instead of C++ and Python codes?
-
when I follow the steps and the codes as in this query thread, Jetson Nano Object Detection C/C++ Example - #7 by dusty_nv
I am having multiple issues. Would you mind helping me with figuring it out please.
I did the
cmake .
make
make VERBOSE=1
the test file at this point had the code of this thread: Jetson Nano Object Detection C/C++ Example - #9 by dusty_nv
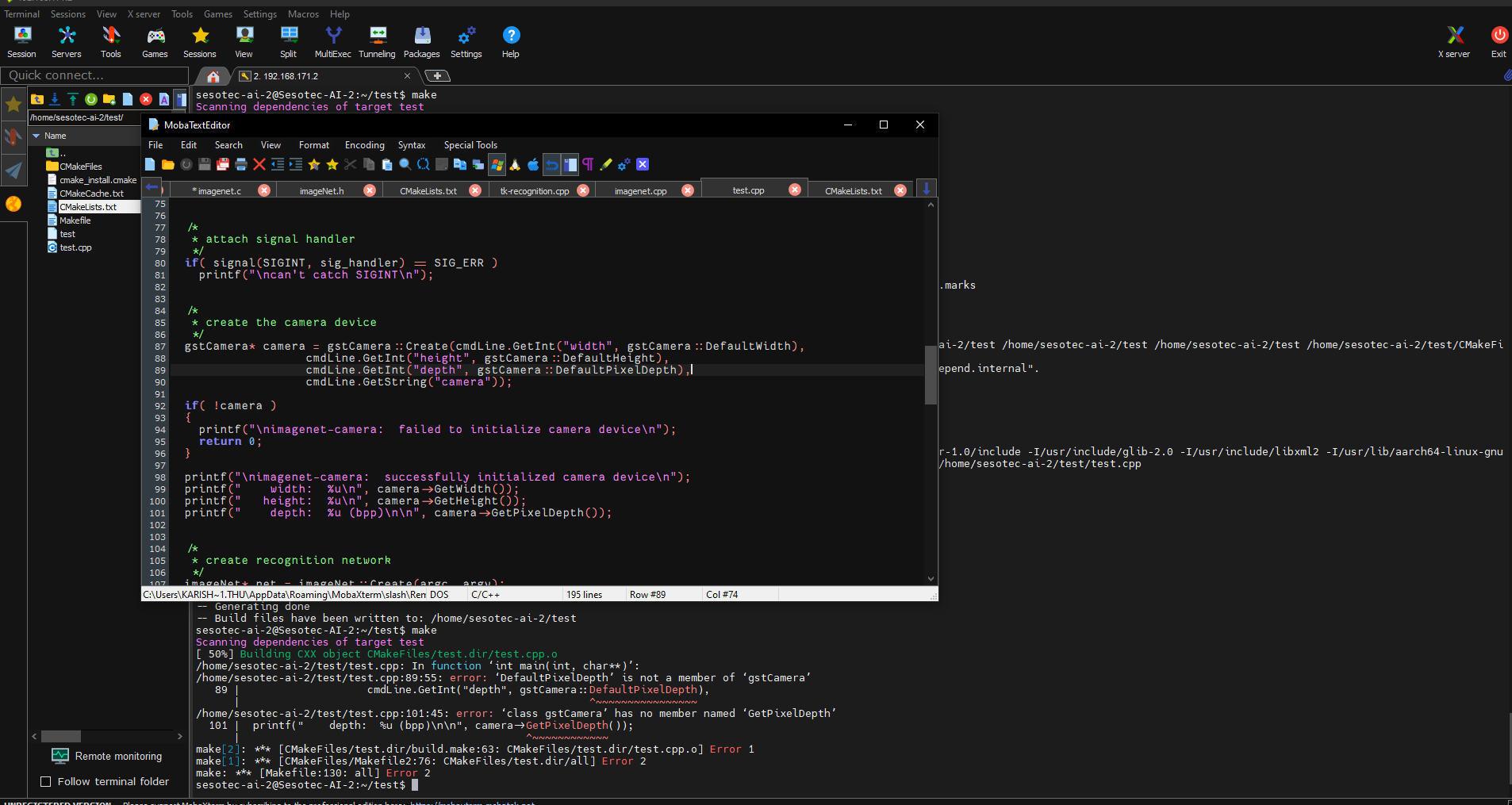
so removed the line : printf(" depth: %u (bpp)\n \n", camera->GetPixelDepth());
and then ~/test
$ ./test --width=640 --height=480
This the error I am facing.
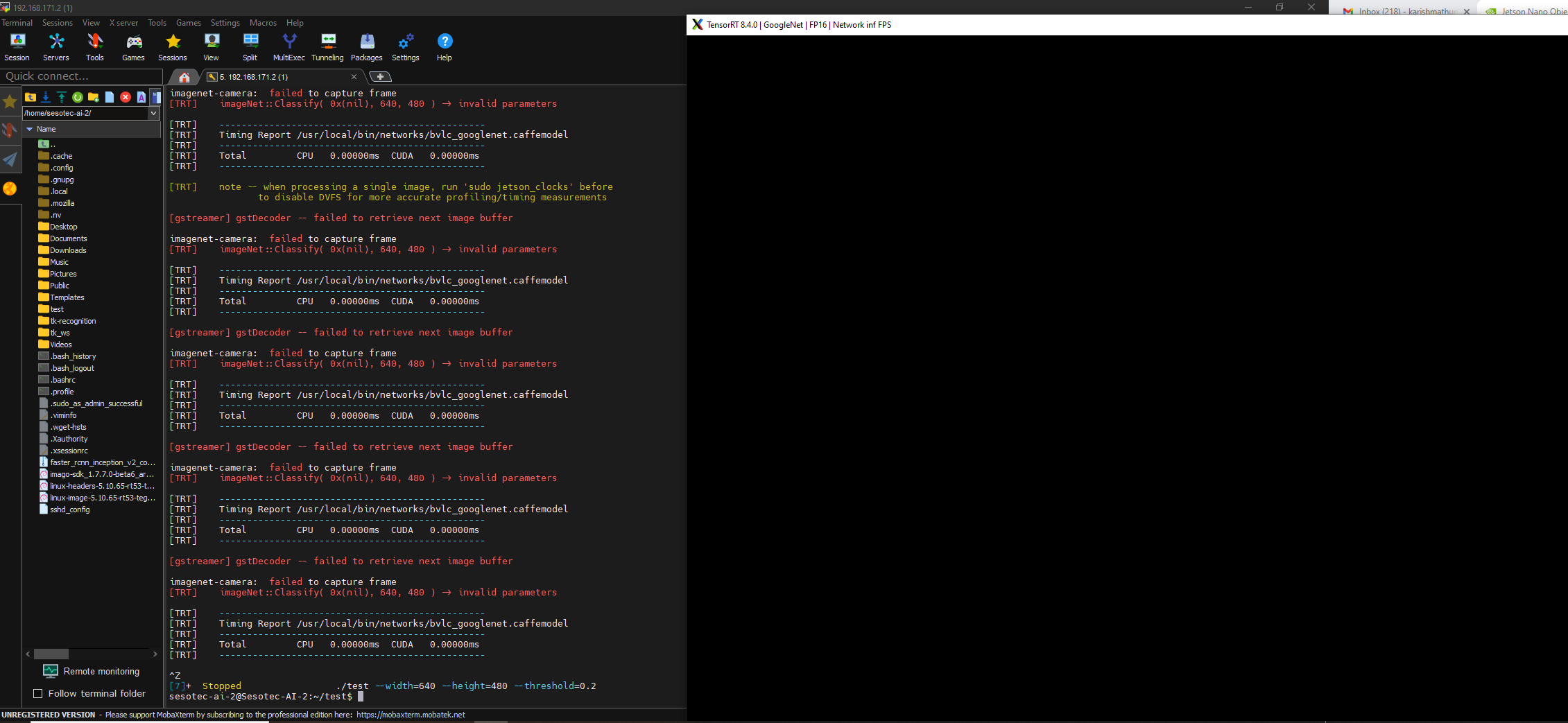

Later I changed the test file to this
include “jetson-utils/gstCamera.h”
include “jetson-utils/glDisplay.h”
include “cudaFont.h”include “jetson-inference/imageNet.h”
include “jetson-utils/commandLine.h”include <signal.h>
include <jetson-inference/detectNet.h>
bool signal_recieved = false;
void sig_handler(int signo)
{
if( signo == SIGINT )
{
LogVerbose(“received SIGINT\n”);
signal_recieved = true;
}
}int usage()
{
printf(“usage: imagenet [–help] [–network=NETWORK] …\n”);
printf(" input_URI [output_URI]\n\n");
printf(“Classify a video/image stream using an image recognition DNN.\n”);
printf(“See below for additional arguments that may not be shown above.\n\n”);
printf(“positional arguments:\n”);
printf(" input_URI resource URI of input stream (see videoSource below)\n");
printf(" output_URI resource URI of output stream (see videoOutput below)\n\n");
printf(“%s”, imageNet::Usage());
printf(“%s”, videoSource::Usage());
printf(“%s”, videoOutput::Usage());
printf(“%s”, Log::Usage());
return 0;
}int main( int argc, char** argv )
{
/*
- parse command line
*/
commandLine cmdLine(argc, argv);if( cmdLine.GetFlag(“help”) )
return usage();/*
- attach signal handler
*/
if( signal(SIGINT, sig_handler) == SIG_ERR )
LogError(“can’t catch SIGINT\n”);/*
- create input stream
/
videoSource input = videoSource::Create(cmdLine, ARG_POSITION(0));if( !input )
{
LogError(“imagenet: failed to create input stream\n”);
return 1;
}/*
- create output stream
/
videoOutput output = videoOutput::Create(cmdLine, ARG_POSITION(1));if( !output )
LogError(“imagenet: failed to create output stream\n”);/*
- create font for image overlay
/
cudaFont font = cudaFont::Create();if( !font )
{
LogError(“imagenet: failed to load font for overlay\n”);
return 1;
}/*
- create recognition network
/
imageNet net = imageNet::Create(cmdLine);if( !net )
{
LogError(“imagenet: failed to initialize imageNet\n”);
return 1;
}/*
processing loop
/
while( !signal_recieved )
{
// capture next image image
uchar3 image = NULL;if( !input->Capture(&image, 1000) )
{
// check for EOS
if( !input->IsStreaming() )
break;LogError("imagenet: failed to capture next frame\n"); continue;}
// classify image
float confidence = 0.0f;
const int img_class = net->Classify(image, input->GetWidth(), input->GetHeight(), &confidence);if( img_class >= 0 )
{
LogVerbose(“imagenet: %2.5f%% class #%i (%s)\n”, confidence * 100.0f, img_class, net->GetClassDesc(img_class));// overlay class label onto original image char str[256]; sprintf(str, "%05.2f%% %s", confidence * 100.0f, net->GetClassDesc(img_class)); font->OverlayText(image, input->GetWidth(), input->GetHeight(), str, 5, 5, make_float4(255, 255, 255, 255), make_float4(0, 0, 0, 100));}
// render outputs
if( output != NULL )
{
output->Render(image, input->GetWidth(), input->GetHeight());// update status bar char str[256]; sprintf(str, "TensorRT %i.%i.%i | %s | Network %.0f FPS", NV_TENSORRT_MAJOR, NV_TENSORRT_MINOR, NV_TENSORRT_PATCH, net->GetNetworkName(), net->GetNetworkFPS()); output->SetStatus(str); // check if the user quit if( !output->IsStreaming() ) signal_recieved = true;}
// print out timing info
net->PrintProfilerTimes();
}/*
- destroy resources
*/
LogVerbose(“imagenet: shutting down…\n”);SAFE_DELETE(input);
SAFE_DELETE(output);
SAFE_DELETE(net);LogVerbose(“imagenet: shutdown complete.\n”);
return 0;
}
and the CMAKELIST.TXT file contains the following
cmake_minimum_required(VERSION 2.8)
include_directories(${PROJECT_INCLUDE_DIR} ${PROJECT_INCLUDE_DIR}/jetson-inference ${PROJECT_INCLUDE_DIR}/jetson-utils)
include_directories(/usr/include/gstreamer-1.0 /usr/lib/aarch64-linux-gnu/gstreamer-1.0/include /usr/include/glib-2.0 /usr/include/libxml2 /usr/lib/aarch64-linux-gnu/glib-2.0/include/ /usr/local/include/jetson-utils)//declare my-recognition project
project(test)file(GLOB imagenetCameraSources *.cpp)
file(GLOB imagenetCameraIncludes *.h )find_package(jetson-utils)
find_package(jetson-inference)
find_package(CUDA)//add directory for libnvbuf-utils to program
link_directories(/usr/lib/aarch64-linux-gnu/tegra)cuda_add_executable(test ${imagenetCameraSources})
target_link_libraries(test jetson-inference)
install(TARGETS test DESTINATION bin)
if I run
$./test --width=640 --height=480 --threshold=0.2 through SSH remote
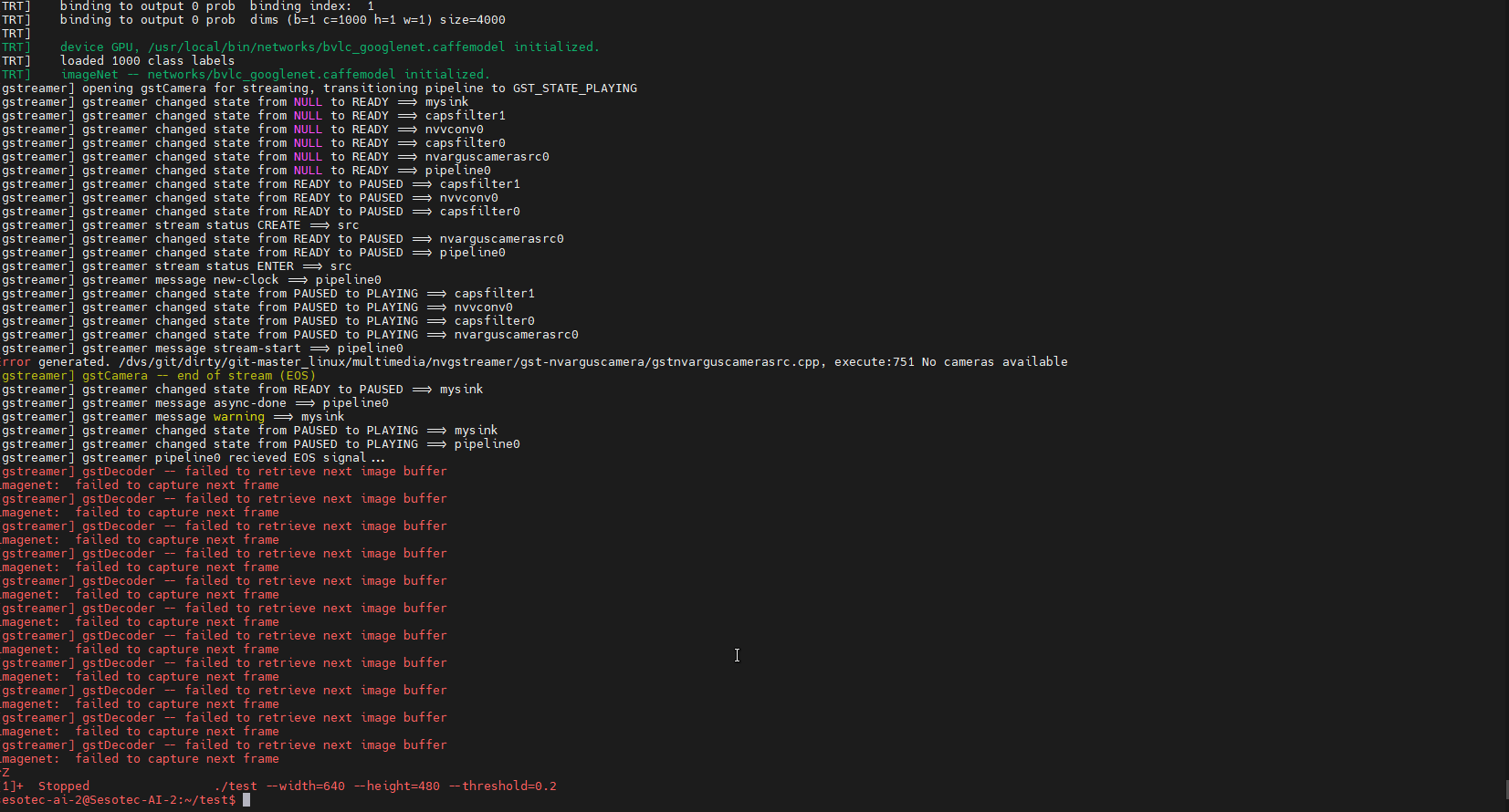
I am totally lost. Kindly excuse my lack of knowledge in this stream.
Regards,
Karishma