I was following this tutorial to get tf information from the simulation, but am not able to find TargetPrim fields in 2022.2.0 version of the software. Is there a new update to date documentation that is consistent with the software version?
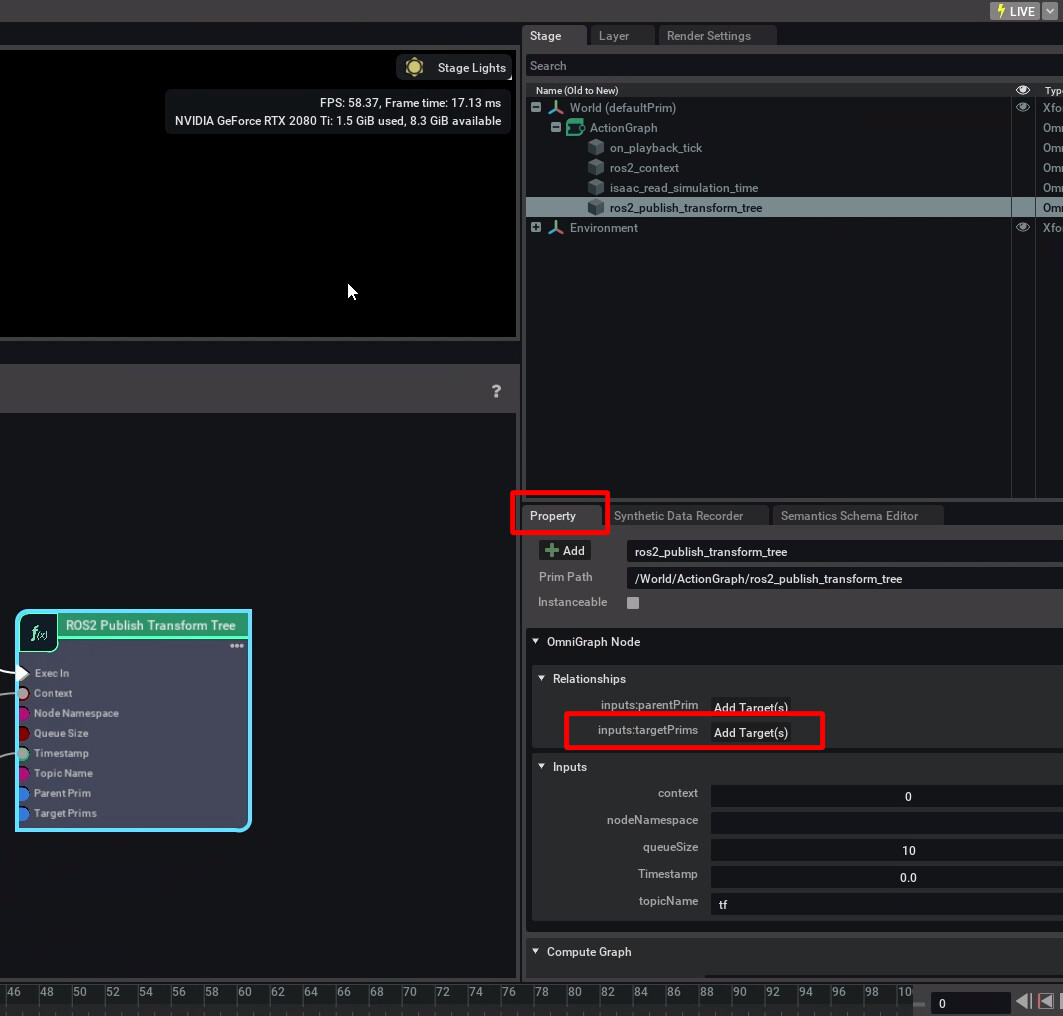
The targetPrim field is defined for the ROS2 Publish Transform Tree. You can find it in the Property tab for this omnigraph node as indicated in the documentation and shown in the next image
For the ROS2 Publish Raw Transform Tree you need to use the parentFrameId and childFrameId fields as described in ROS2PublishRawTransformTree
Hi Toni,
Thank you for drawing out the small details, I missed the difference between ROS2 Publish Transform Tree and Raw Transform Tree. This solves my problem.
-Kushal
This topic was automatically closed 14 days after the last reply. New replies are no longer allowed.