Hi, I have been working on learning OptiX to hopefully use in a research project I am in. I have been going through the Siggraph Optix7 Course trying to understand the pipeline layout. Keep in mind I don’t have a lot of experience with C++ and even less with CUDA so some of these questions might be less about OptiX but please bear with me as I am trying to sort through everything.
First a little bit about what I want to do. I want to load in an elevation map(as mesh) and then render both color and depth values from it. Eventually I want to be able to render several sparse images from different view points rather than a single dense image from a single view point(working now).
I worked up through example 7 in the Siggraph course which explains how to import a mesh from a file and render it. I then started to diverge a little and started to work on the depth rendering. For this I consulted the OptixSDK example “RayCasting”. In the RayCasting example the depth is retrieved through the function optixGetRayTMax() and is defined as a const unsigned int as seen here:
extern "C" __global__ void __closesthit__buffer_hit()
{
const unsigned int t = optixGetRayTmax();
whitted::HitGroupData* rt_data = (whitted::HitGroupData*)optixGetSbtDataPointer();
LocalGeometry geom = getLocalGeometry( rt_data->geometry_data );
// Set the hit data
optixSetPayload_0( __float_as_uint( t ) );
optixSetPayload_1( __float_as_uint( geom.N.x ) );
optixSetPayload_2( __float_as_uint( geom.N.y ) );
optixSetPayload_3( __float_as_uint( geom.N.z ) );
}
I tried implementing something similar in my modified version of the CH program. I have tried two different ways:
- I changed my vec3f to vec4f and appended the depth to end.
- I set up a new payload and implemented the depth just like the RayCasting example.
extern "C" __global__ void __closesthit__radiance()
{
const TriangleMeshSBTData &sbtData
= *(const TriangleMeshSBTData*)optixGetSbtDataPointer();
// get depth
const uint32_t t = optixGetRayTmax();
// vec3f &prd = *(vec3f*)getPRD<vec3f>();
vec4f &prd = *(vec4f*)getPRD<vec4f>();
prd[0] = sbtData.color[0];
prd[1] = sbtData.color[1];
prd[2] = sbtDatacolor[2];
prd[3] = t;
}
Then when placing the value in the buffer I extracted if from the vec4f and saved it to a separate depth buffer, following the syntax of the original example. Instead of the rgb values, I set all the values to depth(this rendered a white depth image instead of a red one). I also again, tried doing this just like the RayCasting example
Modified from the Optix 7 Siggraph Course
vec4f pixelColorPRD = vec4f(0.f);
// the values we store the PRD pointer in:
uint32_t u0, u1, u2;
packPointer( &pixelColorPRD, u0, u1 );
optixTrace(optixLaunchParams.traversable,
camera.position,
rayDir,
0.f, //t_min
1e2f, //t_max
0.0f, // rayTime
OptixVisibilityMask( 255 ),
OPTIX_RAY_FLAG_DISABLE_ANYHIT, // OPTIX_RAY_FLAG_NONE,
SURFACE_RAY_TYPE, // SBT Offset
RAY_TYPE_COUNT, // SBT Stride
SURFACE_RAY_TYPE, // miss SBT Index
u0, u1 );
const int r = int(255.99f*pixelColorPRD.x);
const int g = int(255.99f*pixelColorPRD.y);
const int b = int(255.99f*pixelColorPRD.z);
const int d = int(pixelColorPRD.w);
// convert to 32-bit rgba value (we explicitly set alpha to 0xff
// to make stb_image_write happy ...
const uint32_t rgba = 0xff000000
| (r<<0) | (g<<8) | (b<<16);
const uint32_t depth = 0xff000000
| (d<<0) | (d<<8) | (d<<16);
// and write to frame buffer ...
const uint32_t fbIndex = ix+iy*optixLaunchParams.frame.size.x;
optixLaunchParams.frame.colorBuffer[fbIndex] = rgba;
optixLaunchParams.frame.depthBuffer[fbIndex] = depth;
Following the RayCasting Example:
optixTrace(optixLaunchParams.traversable,
camera.position,
rayDir,
0.f, //t_min
1e2f, //t_max
0.0f, // rayTime
OptixVisibilityMask( 255 ),
OPTIX_RAY_FLAG_DISABLE_ANYHIT, // OPTIX_RAY_FLAG_NONE,
SURFACE_RAY_TYPE, // SBT Offset
RAY_TYPE_COUNT, // SBT Stride
SURFACE_RAY_TYPE, // miss SBT Index
u0, u1, u2);
const int r = int(255.99f*pixelColorPRD.x);
const int g = int(255.99f*pixelColorPRD.y);
const int b = int(255.99f*pixelColorPRD.z);
const float depth = __uint_as_float( u2 );
// convert to 32-bit rgba value (we explicitly set alpha to 0xff
// to make stb_image_write happy ...
const uint32_t rgba = 0xff000000
| (r<<0) | (g<<8) | (b<<16);
// and write to frame buffer ...
const uint32_t fbIndex = ix+iy*optixLaunchParams.frame.size.x;
optixLaunchParams.frame.colorBuffer[fbIndex] = rgba;
optixLaunchParams.frame.depthBuffer[fbIndex] = depth;
}
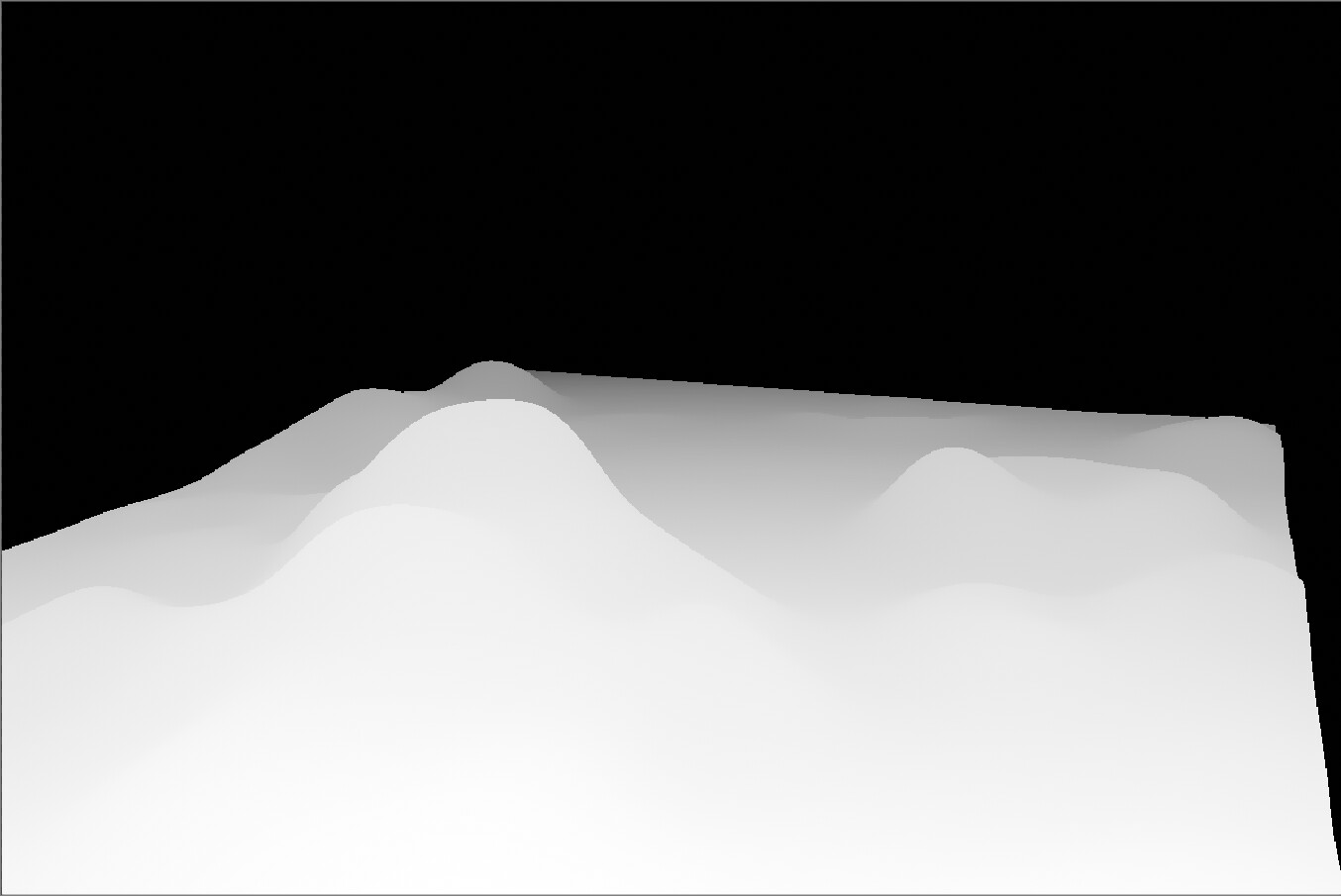
This works to render a depth image. However, there striations present in the image. I guess these are due to some kind clipping in the depth values from the way they are being send back to the host?
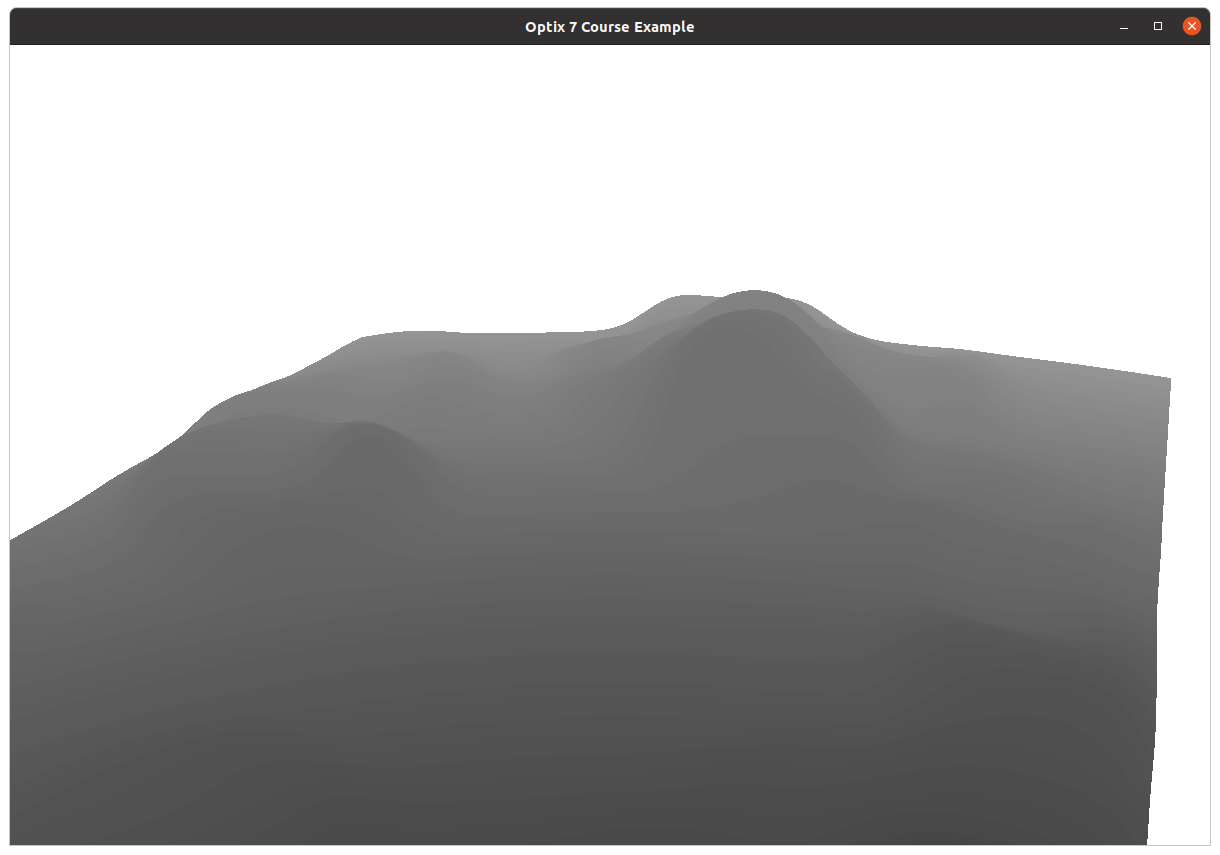
I can also render an image when following the RayCasting Example, but it gives a red hued image. I think I partially understand why, but I also have no experience in OpenGL so I was unable to figure out how to render just one channel.

So I have been trying understand where these striations are coming from. My first thought is had something to do with going back and forth between int and float, but I just don’t have enough experience in this yet to really understand what is going on in each conversion. I wanted to see if I could inspect the data directly, but was having trouble even just printing values to the terminal. I finally figured out to save the image to a file, instead of a rendering to a window. However, I can only save the rgb image and not the depth image. The rgb image saves upside down(probably easy to fix), but the depths just shows a bunch of squares like an invisible layer. While debugging this, I tried changing the call to optixGetRayTMax() and defined it as const float t = optixGetRayTMax() ; To my surprise, this seemed to get rid of the striations.

I am not sure if I am just not wanting to see them, or they are not there, but it seems better. However, can you explain why this would be the case? I am really hoping to develop a better understanding/intuition about these seemingly simple questions.
Is there a better way to get the depth? As I mentioned previously, I eventually want to be able to render a bunch of sparse images from various points, so I want to make sure I am setting this up in an efficient manner.
Finally, can you point me to any documentation or instructions on how to set up a good debugging environment for Optix? I am using VSCode to write everything and build with Cmake.
I am on Ubuntu 20.04, Optix 7.7(I have 8 too, but have done most of the work in 7.7). CUDA 11.8, Nvidia 3080.
Thank you!
Benjamin