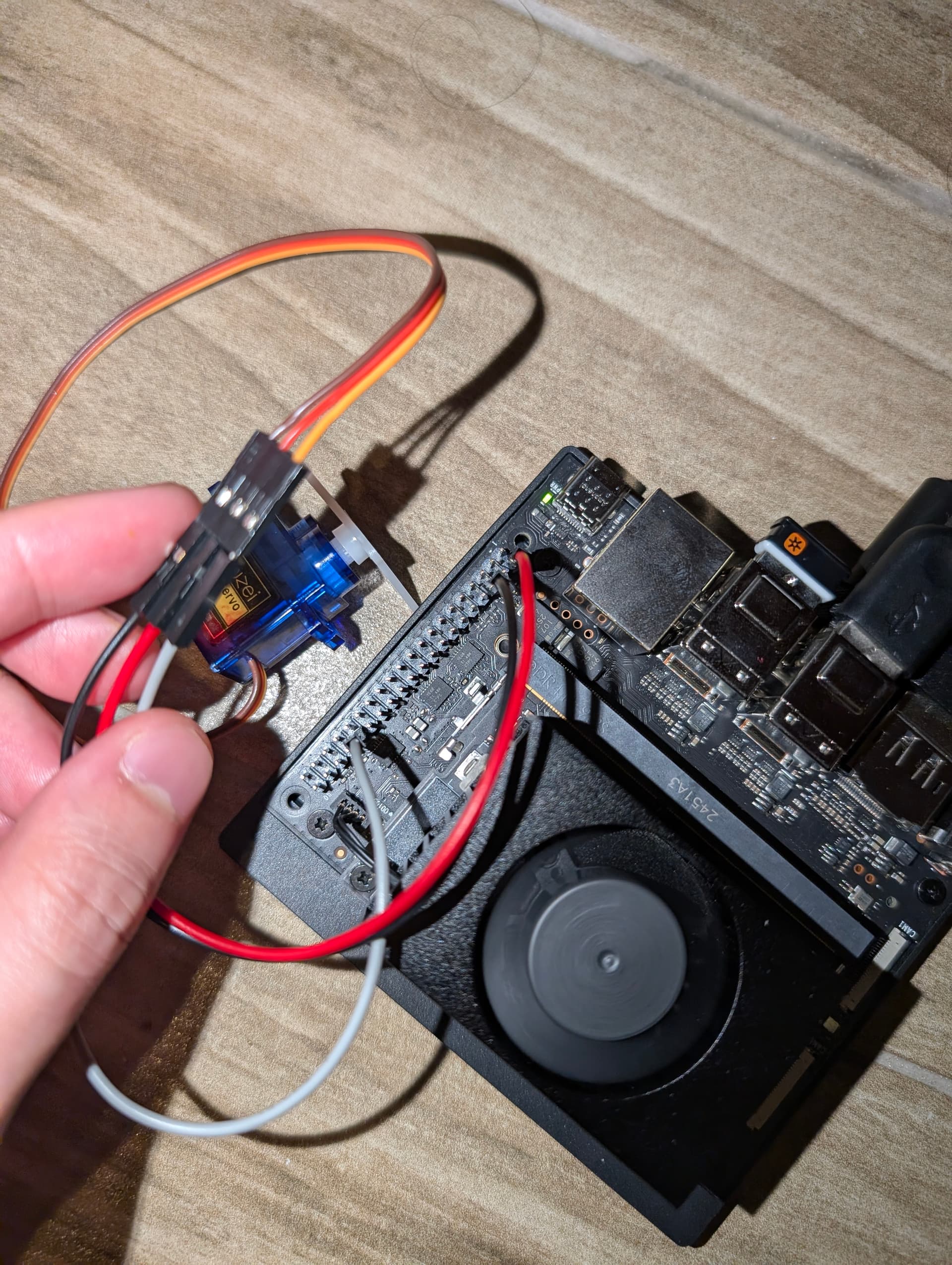
I have just gotten my jetson orin nano and can’t seem to get some simple python tester code working on it before i wire it to my motor drivers. Am I doing something wrong here? the 5v seems to be working, as well as the servo, as it twitches when I attach and detach the 5v wire. The code runs with no issues. Here is my code and my setup. I would be grateful if you could help. Thanks.
import Jetson.GPIO as GPIO
import time
Pin Definitions
servo_pin = 32 # Physical pin 32 (GPIO07)
‘’’
Servo Connection Guide:
- Red wire → Pin 2 (5V)
- Brown wire → Pin 6 (GND) [or any other GND: 14, 20, 30, 34]
- Orange wire-> Pin 32 (GPIO07/PWM)
‘’’
def setup():
GPIO.setmode(GPIO.BOARD)
GPIO.setup(servo_pin, GPIO.OUT)
# Create PWM object at 50Hz (standard frequency for servo motors)
# servo_pin = which pin to use
# 50 = 50Hz frequency (20ms period)
return GPIO.PWM(servo_pin, 50)
def cleanup():
GPIO.cleanup()
def main():
try:
# Initialize GPIO and PWM
pwm = setup()
pwm.start(0)
print("Servo Test Program")
print("Press Ctrl+C to exit\n")
while True:
# Position control through duty cycle:
# 2.5% = 0.5ms pulse (0 degrees)
# 7.5% = 1.5ms pulse (90 degrees)
# 12.5% = 2.5ms pulse (180 degrees)
print("Moving to 0 degrees")
pwm.ChangeDutyCycle(2.5)
time.sleep(1)
print("Moving to 90 degrees")
pwm.ChangeDutyCycle(7.5)
time.sleep(1)
print("Moving to 180 degrees")
pwm.ChangeDutyCycle(12.5)
time.sleep(1)
response = input("Press Enter to repeat or 'q' to quit: ")
if response.lower() == 'q':
break
except KeyboardInterrupt:
print("\nProgram stopped")
finally:
if 'pwm' in locals():
pwm.stop()
cleanup()
if name == “main”:
main()