I am trying to get Kinect sensor working with jetson. I installed drivers following ubuntu guide at Getting Started - OpenKinect I did not face any issue, no error came during installation. But, kinect does not work. It is not listed when I use lsusb command. Any help please.
I also installed processing on jetson tk1. I installed open java and oracle java but still processing does not work. How can I get that working?
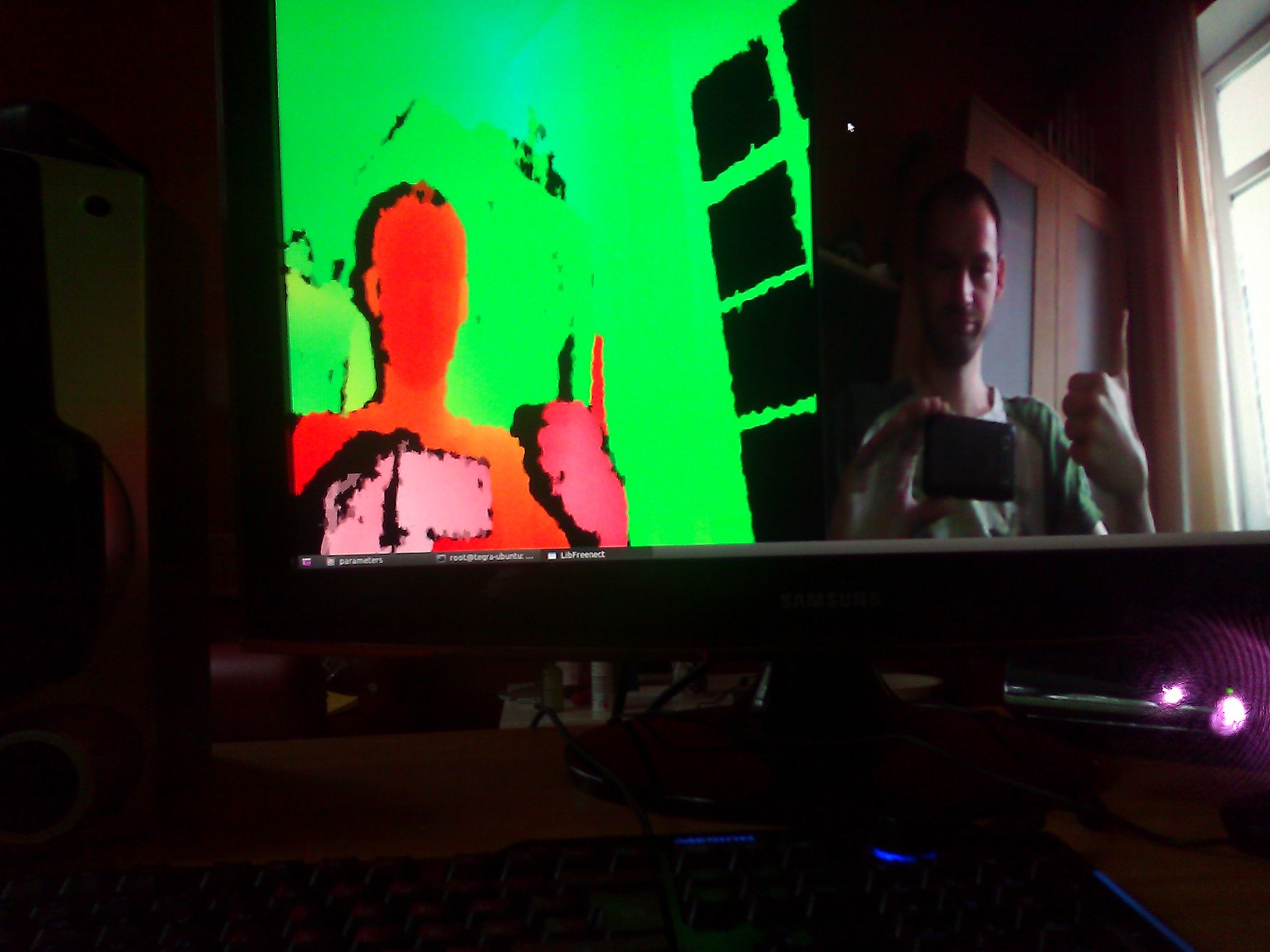
i’m also trying out Kinect on the Jetson, and i suppose you will run into connection problems, even if you see the USB devices via lsusb. it seems, there are problems with the usb 3.0 port, which result in connection/disconnection behaviour. you could see this better if you call lsusb repeatedly (rising IDs and sometimes no devices). if you are lucky, at the exact time you start something like “freenect-glview”, all three devices are present, and you would see a frame at least:
which means that the libfreenect is basically working (i also used tha manual install) pityfully the “xhci_hcd” module (usb 3.0 etc.) is now builtin and not manually replaceable with the old “ehci_hcd” (usb 2.0 etc.). since i am using linux for just five days i am not even trying to recompile a whole kernel but instead, i will try the kinect on the micro USB port, which happens to be USB 2.0. i’ll post again if my adapter is here ;)
It really has nothing to do with USB 3.0 since it is turned off in the “jetson-tk1.conf”
# USB 2.0 operation on USB2 port(J1C2 connector)/for use as root device use ODMDATA=0x6009C000;
# USB 3.0 operation on USB2 port(J1C2 connector) use ODMDATA=0x6209C000, requires firmware load from userspace or initial ramdisk
#ODMDATA=0x6209C000;
ODMDATA=0x6009C000;
Since he uses TLP and his post is a workaround to USB problems while using TLP, it seems not useful for computersystems that don’t, but the result is quite the same.
I got many errors. I tried to fix all that but failed. I have kinect connected to micro usb port through an OTG cable while I am using usb3 port to connect a keyboard and mouse.
Is there some place where I can find pre-built kinect drivers for ARM?
Hi Allanmac, I noticed on your git-hub that you show how to automatically perform some actions once the user logs in. If you would rather have it done automatically when the board boots up (allowing it to work even if the user doesn’t log in), then you can add it to your “/etc/rc.local” script using root permissions, as explained at [url]Jetson/Cameras - eLinux.org. Thanks!
I was also thinking that it would be useful to have a script that temporarily raises the MHz, launches an executable and then restores the GPU to normal DVFS controlled clocks.