Greetings everyone, mainly NVOF developers.
I represent the community of digital video processing, using the open-source graph processing framework VapourSynth.
Some of the best algorithms we use rely heavily on motion estimation and compensation. We reconstruct current frame from its surrounding to gather information and achieve, for example, purely temporal denoising.
For years now we’ve been stuck with a slow and not very reliable block-matching motion estimation. So I and, I believe, the whole community are interested in having precise dense optical flow calculation tool.
I made a proof of concept NVOF plugin. It’s open-source and available here:
https://bitbucket.org/mystery_keeper/vapoursynth-nvof
So far it’s unoptimized, and there might bugs and flaws in my logic. Comments on the code and improvement suggestions are welcome.
I wanted to tell my full experience in this post, but as new user, I cannot post more than one link/image. I’ll try to tell more in the comments and outline my main concern here:
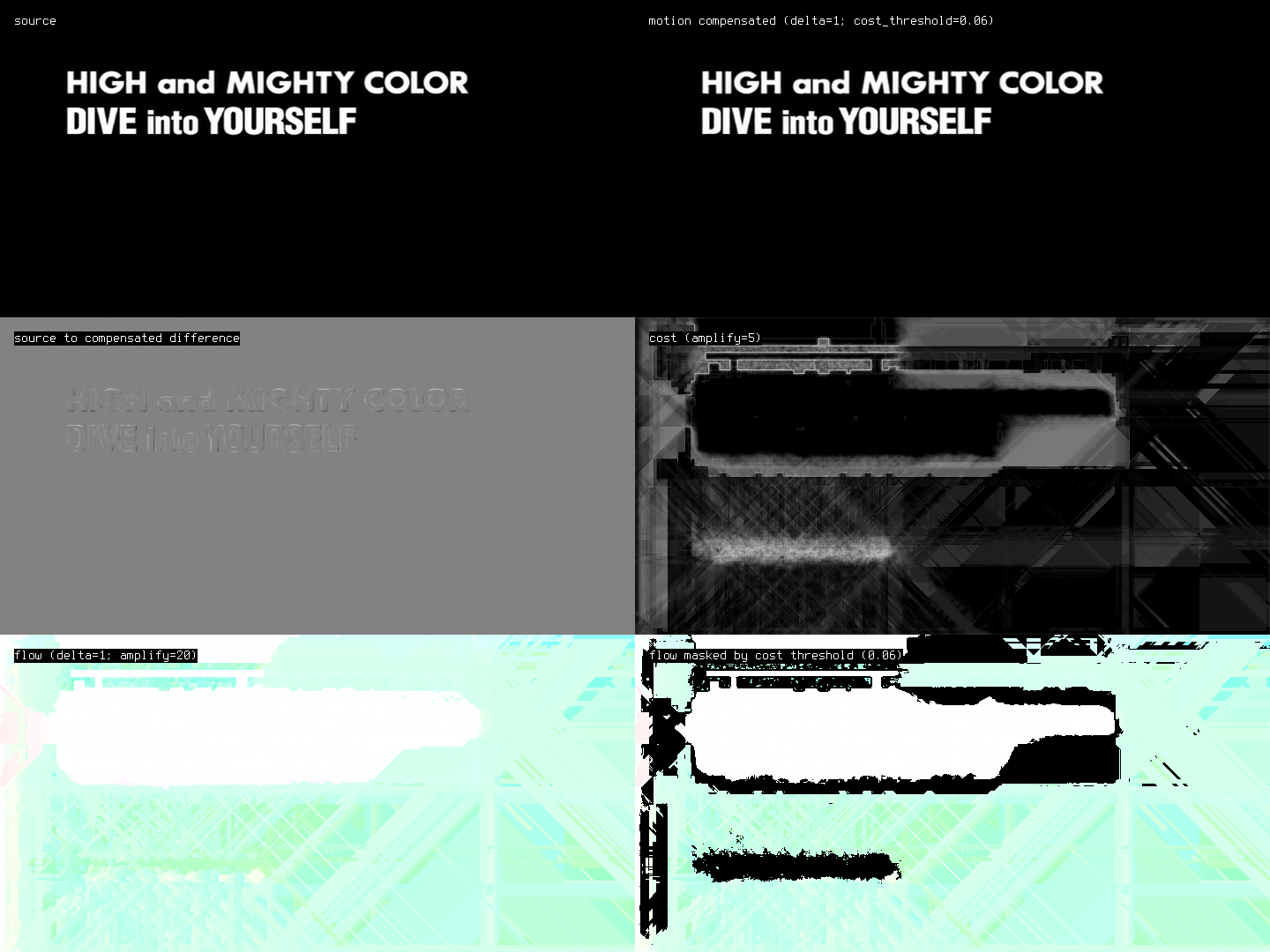
NVOF cannot be used for motion compensation without a confidence field. And the cost field it produces cannot be used as one.
I get impressive results in some frame areas and horrible errors in others. And masking by thresholding the cost field doesn’t really help to discern the pixels with good vectors from the ones with errors. The cost field actually looks weird!
I’m very interested in the improvement of NVOF. My plugin can already be used as a testing tool. And I’d be happy to help with testing. The fastest way to reach me is in Discord: Kittyfluff#6935
Thank you, and keep up your work.