I found this link related to my issue: Wheel robot with 4 joints can't move by Differential Controller using Action Graph and ROS - #9 by queque.daffer
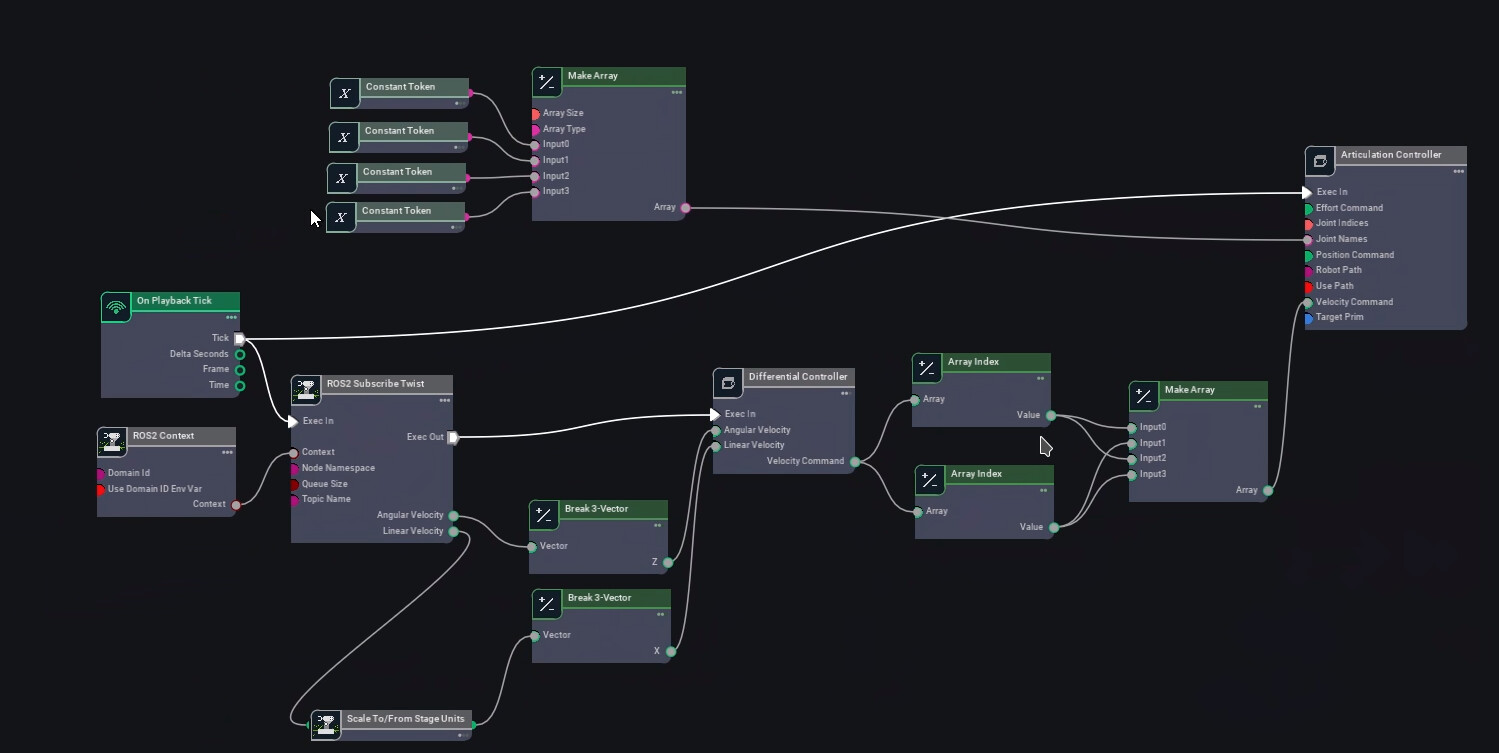
Here, they use a single articulation controller to control all four wheels. I implemented that same structure, and the behaviour is exactly as before.
Also related is the following issue: 4 wheels differential drive robot issues
I have the same behaviour: the wheels are spinning and creating a circle with a very large radius instead of doing a spot turn.
Is there any way to figure out what is causing the issue? And is there a war to specify the distance between the front and rear wheels?