Hello,
I am using a Jetson Xavier NX for real-time Object detection and tracking usually with Yolov8. My current setup includes:
YOLOv8n model converted to TensorRT
Torch, TorchVision, and ONNX installed with CUDA support
OpenCV compiled with CUDA support
Despite this, I am only achieving 12–15 FPS.
I would like to know:
How to properly increase FPS on the Jetson Xavier NX for real-time AI inference and video streaming.
Which settings, optimizations, or modes can maximize performance for TensorRT models on this platform.
Any best practices, recommended configurations, or system-level tweaks specific to Jetson Xavier NX.
waiting for your help.
Y-T-G
October 6, 2025, 5:54am
2
Did you convert the model to FP16?
Hi,
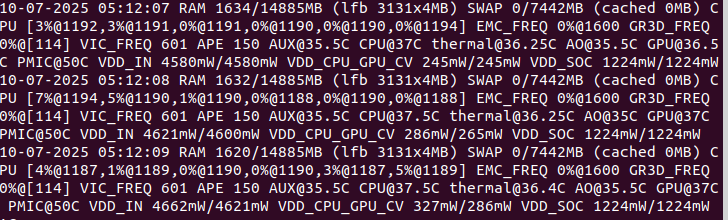
Could you check GPU utilization with tegrastats?
$ sudo tegrastats
It’s common that the pre-processing or post-processing, which run on CPU, takes long time to finish.
NVIDIA DeepStream SDK 8.0 / 7.1 / 7.0 / 6.4 / 6.3 / 6.2 / 6.1.1 / 6.1 / 6.0.1 / 6.0 / 5.1 implementation for YOLO models
Thanks.
Thank you.
Thank you!
Okay, I’ll use DeepStream.
I used this command:
$ sudo tegrastats
Are there other ways to increase Jetson’s speed or FPS?