Isaac Sim Version
2024.2.0
Operating System
Ubuntu 22.04
GPU Information
- Model: NVIDIA RTX 4070
- Driver Version: Latest
Topic Description
Detailed Description
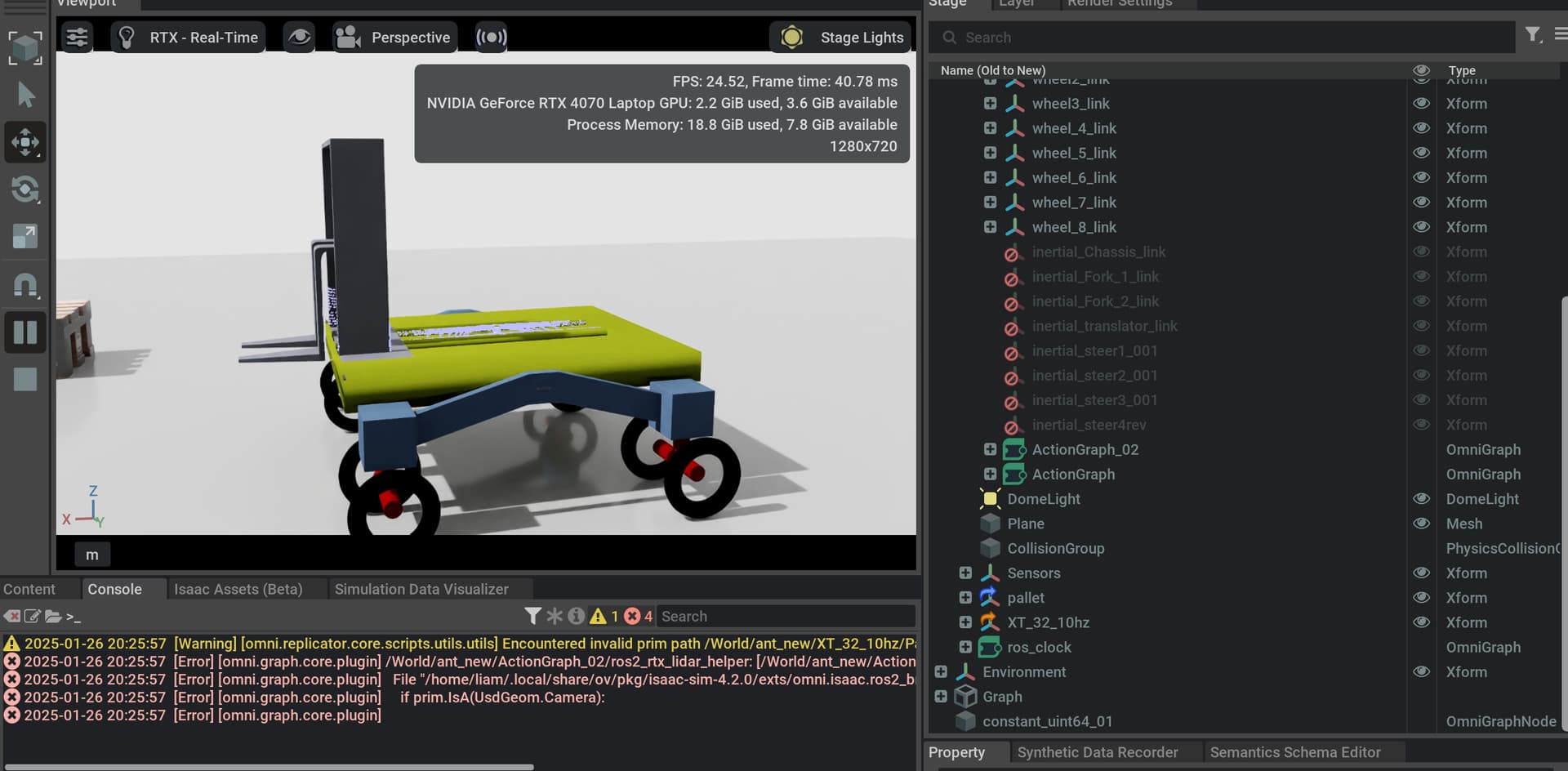
I am trying to set up a LIDAR sensor in Isaac Sim to simulate and publish ROS 2 topics for use in RViz2. My goal is to integrate the LIDAR sensor into a robotic platform similar to the Nova_Carter example, ensuring it is properly nested within the robot’s TF tree and able to publish data.
However, when I try to attach the LIDAR sensor to the robot’s chassis_link or any other articulation link, I encounter repeated errors in the Isaac Sim logs stating:
[Warning] [omni.usd] Coding Error: in _Get at line 3003 of ... -- Failed verification: ' prim '
The sensor then either disappears from the viewport or behaves unpredictably. In RViz2, even when the LIDAR appears to publish data, I receive the following error messages:
[rviz]: Message Filter dropping message: frame 'front_3d_lidar' at time XX.XXX for reason 'discarding message because the queue is full'
Additionally, when I visualize the TF tree, the LIDAR frame (front_3d_lidar) is not present as a child of the expected chassis_link.
Steps to Reproduce
- Add a LIDAR sensor from the Isaac Sim library (e.g., XT-32).
- Attach the sensor to the robot’s
chassis_linkor another appropriate link in the stage hierarchy. - Enable ROS 2 bridge and ensure the sensor publishes data to a ROS topic (e.g.,
/front_3d_lidar/scan). - Run the simulation and visualize the data in RViz2.
Error Messages
From Isaac Sim Logs:
frames_2025-01-26_14.05.37.pdf (14.1 KB)





[Warning] [omni.usd] Coding Error: in _Get at line 3003 of /builds/omniverse/usd-ci/USD/pxr/usdImaging/usdImaging/delegate.cpp – Failed verification: ’ prim ’
[Warning] [omni.usd]
[Warning] [carb] Client omni.usdphysicsui.plugin has acquired [carb::imguizmo::ImGuizmo v1.0] 100 times. Consider accessing this interface with carb::getCachedInterface() (Performance warning)
From RViz2 Console:
[rviz]: Message Filter dropping message: frame ‘front_3d_lidar’ at time XX.XXX for reason ‘discarding message because the queue is full’
Additional Information
What I’ve Tried
- Dragging and dropping the LIDAR under different links in the stage hierarchy (e.g.,
chassis_link,articulation_root). - Resetting the LIDAR’s
Translate,Rotate, andScalevalues in the Property panel to ensure no invalid transforms. - Replacing the LIDAR sensor with another sensor from the Isaac Sim library.
- Adding a static transform publisher in ROS 2 to bridge the missing TF frame (
chassis→front_3d_lidar). - Adjusting RViz2 settings, including increasing the queue size and reducing the publish rate of the LIDAR sensor.
Additional Context
I am trying to mimic the Nova_Carter example setup to ensure proper TF hierarchy and ROS 2 topic publication.
My setup involves publishing LIDAR data for RViz2 visualization and TF tree validation.
The issue persists regardless of the parent link or other adjustments to the LIDAR setup.
Ive spent way to long trying to debug this and cant get anything to work. this is a time sensitive issue. I would really be grateful for any help or a meeting to be setup




