• Hardware Platform (Jetson / GPU): GPU
• DeepStream Version: 6.3
• TensorRT Version: 8.5.3-1+cuda11.8
• NVIDIA GPU Driver Version (valid for GPU only): 525.89.02
• Issue Type( questions, new requirements, bugs): questions
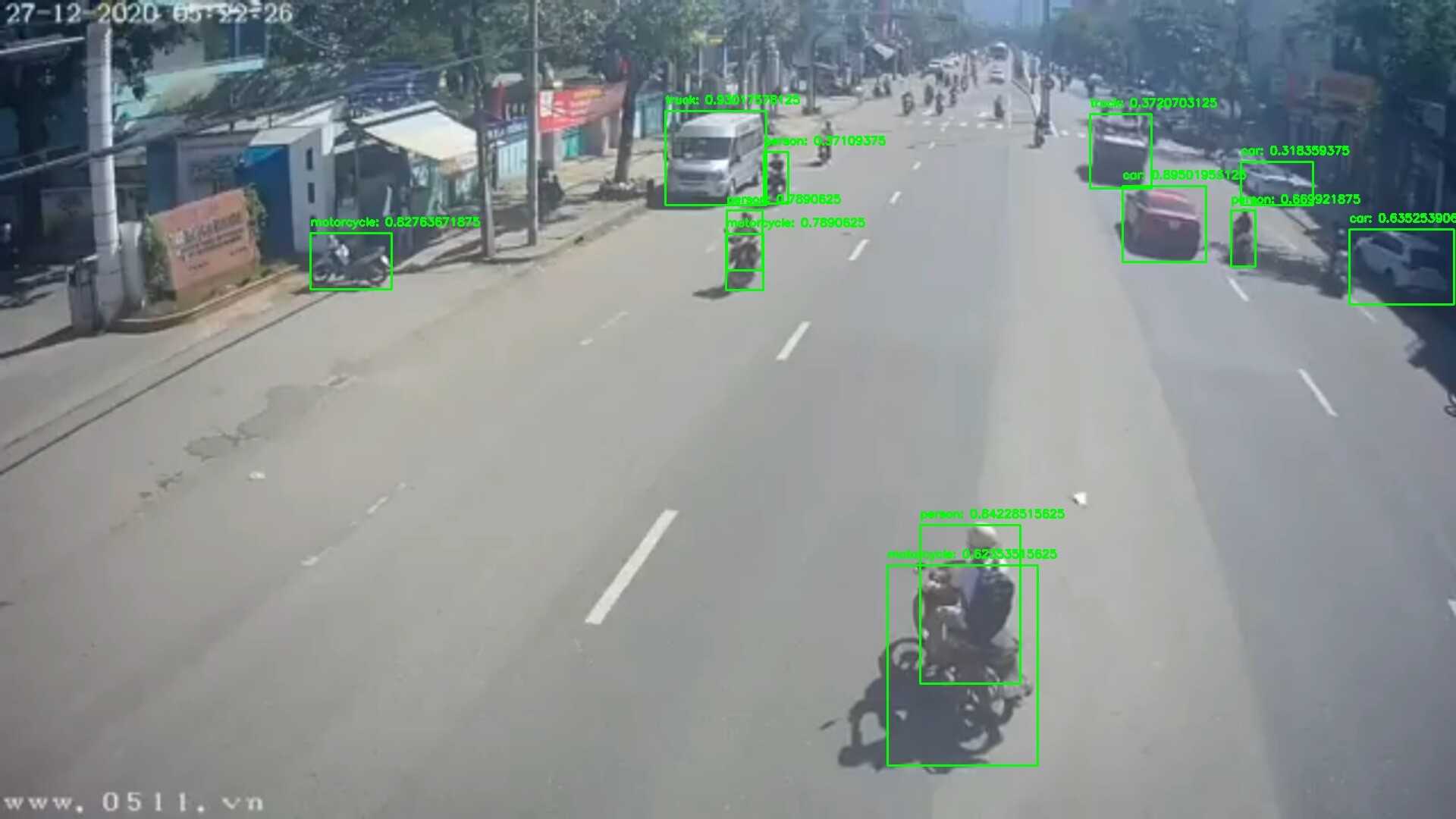
When using tracking NvDCF, the results is better than Deepsort tracking, frame miss object when using pgie:
When using NvDCF:
BaseConfig:
minDetectorConfidence: 0 # If the confidence of a detector bbox is lower than this, then it won't be considered for tracking
TargetManagement:
enableBboxUnClipping: 1 # In case the bbox is likely to be clipped by image border, unclip bbox
maxTargetsPerStream: 150 # Max number of targets to track per stream. Recommended to set >10. Note: this value should account for the targets being tracked in shadow mode as well. Max value depends on the GPU memory capacity
# [Creation & Termination Policy]
minIouDiff4NewTarget: 0.5 # If the IOU between the newly detected object and any of the existing targets is higher than this threshold, this newly detected object will be discarded.
minTrackerConfidence: 0.2 # If the confidence of an object tracker is lower than this on the fly, then it will be tracked in shadow mode. Valid Range: [0.0, 1.0]
probationAge: 3 # If the target's age exceeds this, the target will be considered to be valid.
maxShadowTrackingAge: 30 # Max length of shadow tracking. If the shadowTrackingAge exceeds this limit, the tracker will be terminated.
earlyTerminationAge: 1 # If the shadowTrackingAge reaches this threshold while in TENTATIVE period, the target will be terminated prematurely.
TrajectoryManagement:
useUniqueID: 0 # Use 64-bit long Unique ID when assignining tracker ID. Default is [true]
DataAssociator:
dataAssociatorType: 0 # the type of data associator among { DEFAULT= 0 }
associationMatcherType: 0 # the type of matching algorithm among { GREEDY=0, GLOBAL=1 }
checkClassMatch: 1 # If checked, only the same-class objects are associated with each other. Default: true
# [Association Metric: Thresholds for valid candidates]
minMatchingScore4Overall: 0.0 # Min total score
minMatchingScore4SizeSimilarity: 0.6 # Min bbox size similarity score
minMatchingScore4Iou: 0.0 # Min IOU score
minMatchingScore4VisualSimilarity: 0.7 # Min visual similarity score
# [Association Metric: Weights]
matchingScoreWeight4VisualSimilarity: 0.6 # Weight for the visual similarity (in terms of correlation response ratio)
matchingScoreWeight4SizeSimilarity: 0.0 # Weight for the Size-similarity score
matchingScoreWeight4Iou: 0.4 # Weight for the IOU score
StateEstimator:
stateEstimatorType: 1 # the type of state estimator among { DUMMY=0, SIMPLE=1, REGULAR=2 }
# [Dynamics Modeling]
processNoiseVar4Loc: 2.0 # Process noise variance for bbox center
processNoiseVar4Size: 1.0 # Process noise variance for bbox size
processNoiseVar4Vel: 0.1 # Process noise variance for velocity
measurementNoiseVar4Detector: 4.0 # Measurement noise variance for detector's detection
measurementNoiseVar4Tracker: 16.0 # Measurement noise variance for tracker's localization
VisualTracker:
visualTrackerType: 1 # the type of visual tracker among { DUMMY=0, NvDCF=1 }
# [NvDCF: Feature Extraction]
useColorNames: 1 # Use ColorNames feature
useHog: 0 # Use Histogram-of-Oriented-Gradient (HOG) feature
featureImgSizeLevel: 2 # Size of a feature image. Valid range: {1, 2, 3, 4, 5}, from the smallest to the largest
featureFocusOffsetFactor_y: -0.2 # The offset for the center of hanning window relative to the feature height. The center of hanning window would move by (featureFocusOffsetFactor_y*featureMatSize.height) in vertical direction
# [NvDCF: Correlation Filter]
filterLr: 0.075 # learning rate for DCF filter in exponential moving average. Valid Range: [0.0, 1.0]
filterChannelWeightsLr: 0.1 # learning rate for the channel weights among feature channels. Valid Range: [0.0, 1.0]
gaussianSigma: 0.75 # Standard deviation for Gaussian for desired response when creating DCF filter [pixels]
Using Deepsort with your weight in Gst-nvtracker — DeepStream documentation

BaseConfig:
minDetectorConfidence: 0.0762 # If the confidence of a detector bbox is lower than this, then it won't be considered for tracking
TargetManagement:
preserveStreamUpdateOrder: 0 # When assigning new target ids, preserve input streams' order to keep target ids in a deterministic order over multuple runs
maxTargetsPerStream: 150 # Max number of targets to track per stream. Recommended to set >10. Note: this value should account for the targets being tracked in shadow mode as well. Max value depends on the GPU memory capacity
# [Creation & Termination Policy]
minIouDiff4NewTarget: 0.9847 # If the IOU between the newly detected object and any of the existing targets is higher than this threshold, this newly detected object will be discarded.
minTrackerConfidence: 0.4314 # If the confidence of an object tracker is lower than this on the fly, then it will be tracked in shadow mode. Valid Range: [0.0, 1.0]
probationAge: 2 # If the target's age exceeds this, the target will be considered to be valid.
maxShadowTrackingAge: 68 # Max length of shadow tracking. If the shadowTrackingAge exceeds this limit, the tracker will be terminated.
earlyTerminationAge: 1 # If the shadowTrackingAge reaches this threshold while in TENTATIVE period, the the target will be terminated prematurely.
TrajectoryManagement:
useUniqueID: 0 # Use 64-bit long Unique ID when assignining tracker ID.
DataAssociator:
dataAssociatorType: 0 # the type of data associator among { DEFAULT= 0 }
associationMatcherType: 1 # the type of matching algorithm among { GREEDY=0, CASCADED=1 }
checkClassMatch: 1 # If checked, only the same-class objects are associated with each other. Default: true
# [Association Metric: Mahalanobis distance threshold (refer to DeepSORT paper) ]
thresholdMahalanobis: 12.1875 # Threshold of Mahalanobis distance. A detection and a target are not matched if their distance is larger than the threshold.
# [Association Metric: Thresholds for valid candidates]
minMatchingScore4Overall: 0.1794 # Min total score
minMatchingScore4SizeSimilarity: 0.3291 # Min bbox size similarity score
minMatchingScore4Iou: 0.2364 # Min IOU score
minMatchingScore4ReidSimilarity: 0.7505 # Min reid similarity score
# [Association Metric: Weights for valid candidates]
matchingScoreWeight4SizeSimilarity: 0.7178 # Weight for the Size-similarity score
matchingScoreWeight4Iou: 0.4551 # Weight for the IOU score
matchingScoreWeight4ReidSimilarity: 0.3197 # Weight for the reid similarity
# [Association Metric: Tentative detections] only uses iou similarity for tentative detections
tentativeDetectorConfidence: 0.2479 # If a detection's confidence is lower than this but higher than minDetectorConfidence, then it's considered as a tentative detection
minMatchingScore4TentativeIou: 0.2376 # Min iou threshold to match targets and tentative detection
StateEstimator:
stateEstimatorType: 2 # the type of state estimator among { DUMMY=0, SIMPLE=1, REGULAR=2 }
# [Dynamics Modeling]
noiseWeightVar4Loc: 0.0503 # weight of process and measurement noise for bbox center; if set, location noise will be proportional to box height
noiseWeightVar4Vel: 0.0037 # weight of process and measurement noise for velocity; if set, velocity noise will be proportional to box height
useAspectRatio: 1 # use aspect ratio in Kalman filter's observation
ReID:
reidType: 1 # The type of reid among { DUMMY=0, DEEP=1 }
# [Reid Network Info]
batchSize: 100 # Batch size of reid network
workspaceSize: 1000 # Workspace size to be used by reid engine, in MB
reidFeatureSize: 256 # Size of reid feature
reidHistorySize: 100 # Max number of reid features kept for one object
inferDims: [3, 256, 128] # Reid network input dimension CHW or HWC based on inputOrder
networkMode: 1 # Reid network inference precision mode among {fp32=0, fp16=1, int8=2 }
# [Input Preprocessing]
inputOrder: 0 # Reid network input order among { NCHW=0, NHWC=1 }. Batch will be converted to the specified order before reid input.
colorFormat: 0 # Reid network input color format among {RGB=0, BGR=1 }. Batch will be converted to the specified color before reid input.
offsets: [123.6750, 116.2800, 103.5300] # Array of values to be subtracted from each input channel, with length equal to number of channels
netScaleFactor: 0.01735207 # Scaling factor for reid network input after substracting offsets
keepAspc: 1 # Whether to keep aspc ratio when resizing input objects for reid
# [Output Postprocessing]
addFeatureNormalization: 1 # If reid feature is not normalized in network, adding normalization on output so each reid feature has l2 norm equal to 1
# [Paths and Names]
tltEncodedModel: "/opt/nvidia/deepstream/deepstream/samples/models/Tracker/resnet50_market1501.etlt" # NVIDIA TAO model path
tltModelKey: "nvidia_tao" # NVIDIA TAO model key
modelEngineFile: "/opt/nvidia/deepstream/deepstream/samples/models/Tracker/resnet50_market1501.etlt_b100_gpu0_fp16.engine" # Engine file path
**How to change the parameter for not miss object detection
**