Is there a way to more accurately define the range of a ball joint in IsaacSim?
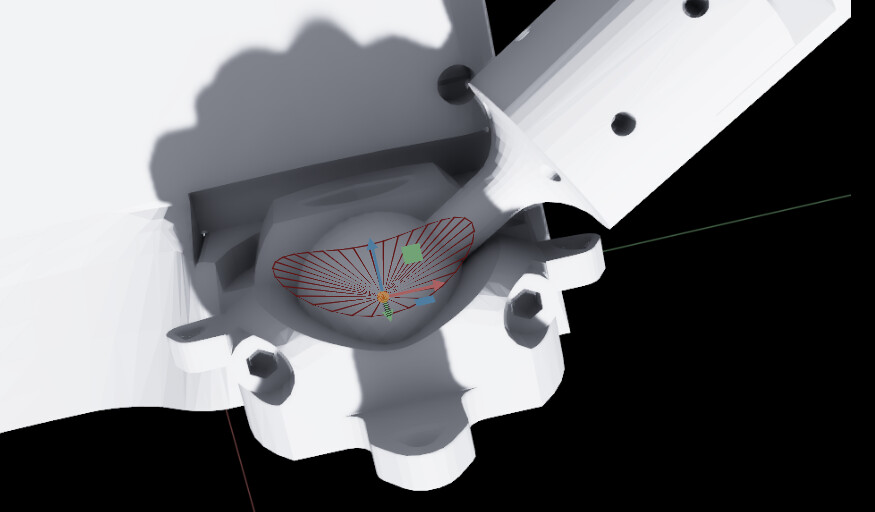
The current joint range looks like this:
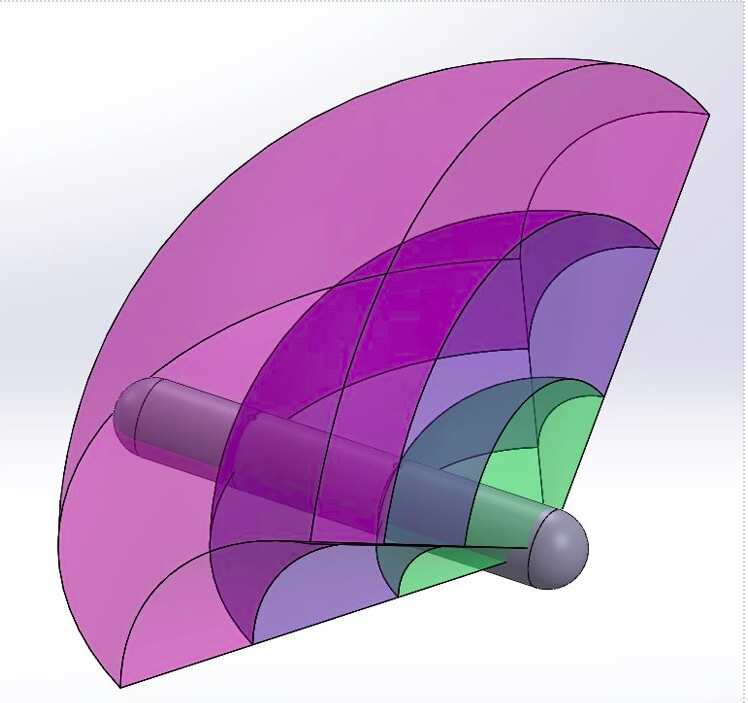
I want the workspace coverage of the first thumb segment to look like this green area shown here:
I’ve been trying to tune the joint range from the spherical joint settings but it seems impossible to make the way I want using this method.
I think the closest you can get is with a full 6dof joint and restricting individual rotational degrees of freedom
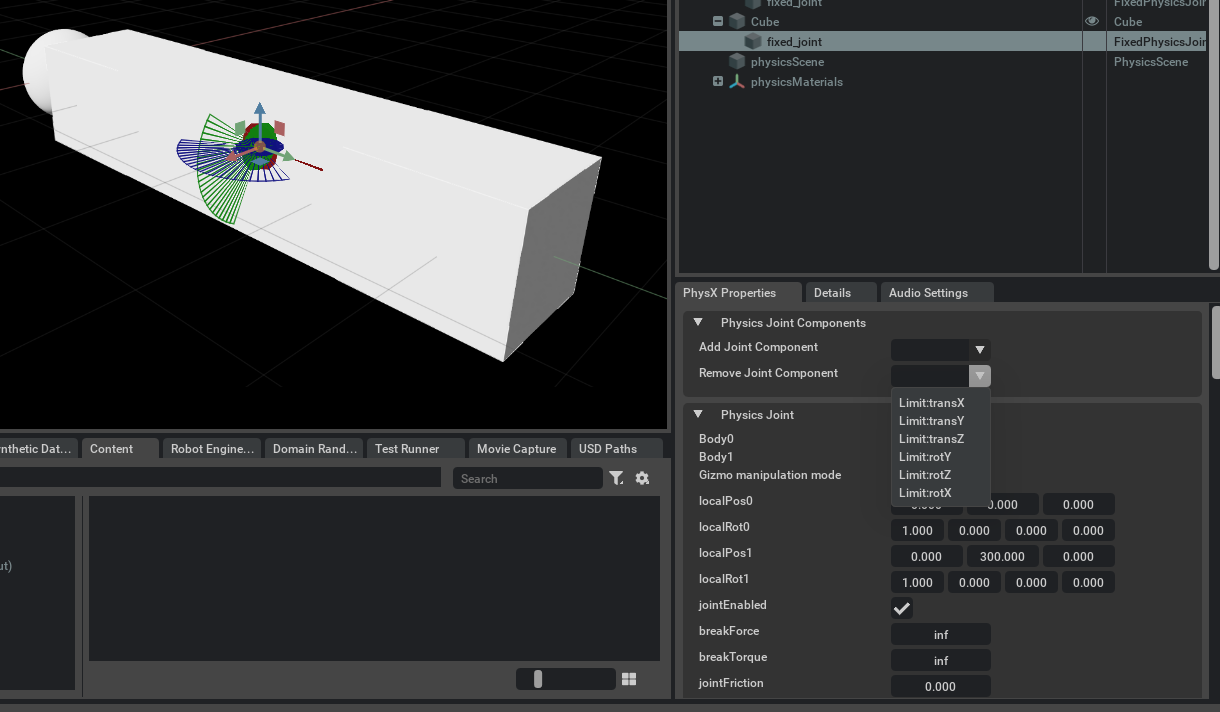
You can create a fixed joint, and then remove the fixed joint component, and add back the individual translational and rotation limits.
In this image I have all three translational limits set to zero so it doesn’t move. X Rotation has a zero limit and only Y Rotation and Z Rotation have non zero limits.
1 Like