I tried implementation a ROS2 node following the VPI3.2 sample for Sparse LK Optical Flow,
I found that the first few frames of tracking always produce good results but subsequently all fail miserably.
Initially i tried swapping the pyramids, or even regenerating the pyramids each frames but it is still the same. I had tried logging the hash of the inputs (prevPyr, curPyr, prevPts) to the vpiSubmitOpticalFlowPyrLK and it is valid. Changing between CPU and CUDA backend does not work.
Afterwards, I tried comparing with OpenCV side by side with the same input.
These are the observations

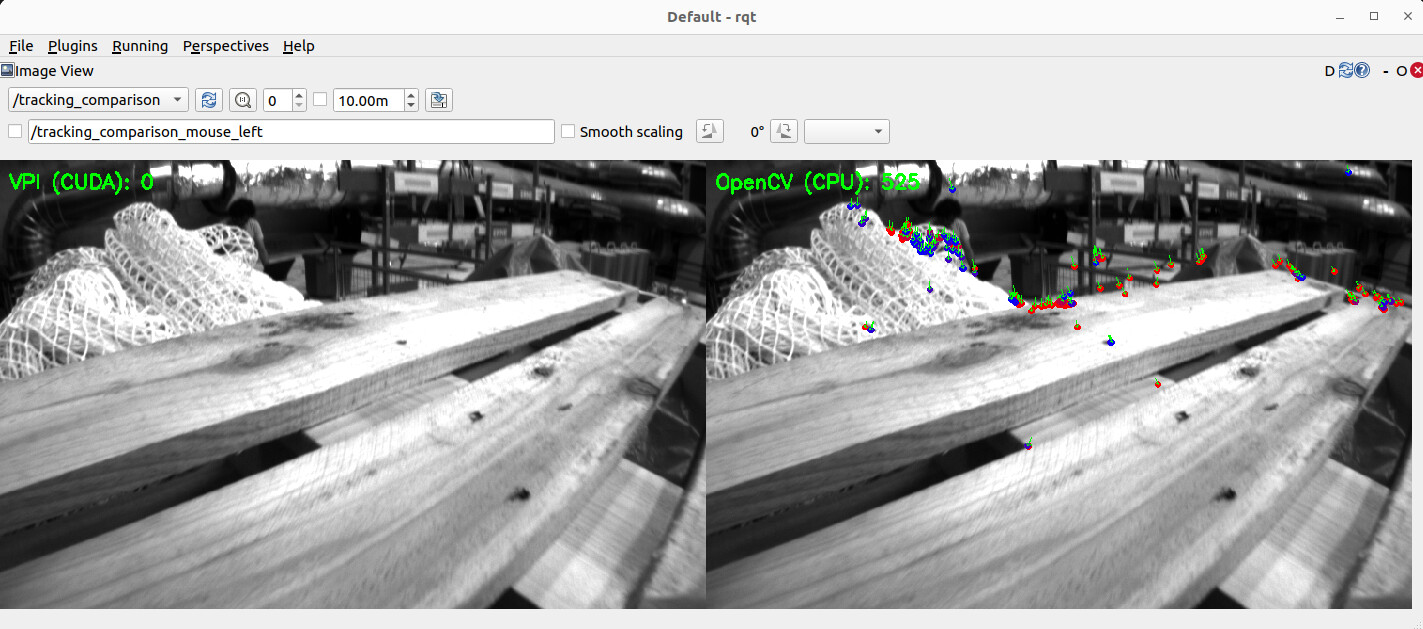

Is there any place I should look out for, I don’t think there is any data corruption issue.
Following is the code.
#include <rclcpp/rclcpp.hpp>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/msg/image.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/video/tracking.hpp>
#include <vpi/OpenCVInterop.hpp>
#include <vpi/Array.h>
#include <vpi/Image.h>
#include <vpi/Pyramid.h>
#include <vpi/Status.h>
#include <vpi/Stream.h>
#include <vpi/algo/ConvertImageFormat.h>
#include <vpi/algo/GaussianPyramid.h>
#include <vpi/algo/HarrisCorners.h>
#include <vpi/algo/OpticalFlowPyrLK.h>
#include <algorithm>
#include <numeric>
#include <vector>
#include <mutex>
#include <map>
constexpr int MAX_KEYPOINTS = 200;
constexpr int MAX_HARRIS_CORNERS = 8192;
constexpr float MIN_DIST = 10.0f;
constexpr int MIN_DIST_SQ = 100;
constexpr int WINDOW_SIZE = 21;
constexpr int MAX_ITERATIONS = 30;
constexpr float EPSILON = 0.5f;
#define CHECK_STATUS(STMT) \
do \
{ \
VPIStatus status__ = (STMT); \
if (status__ != VPI_SUCCESS) \
{ \
char buffer[VPI_MAX_STATUS_MESSAGE_LENGTH]; \
vpiGetLastStatusMessage(buffer, sizeof(buffer)); \
std::ostringstream ss; \
ss << vpiStatusGetName(status__) << ": " << buffer; \
RCLCPP_ERROR(rclcpp::get_logger("vpi_node"), "%s", ss.str().c_str()); \
throw std::runtime_error(ss.str()); \
} \
} while (0);
struct TrackState
{
std::vector<int> ids;
std::vector<int> ages;
std::map<int, cv::Point2f> prev_pts_map;
void updateHistory(const std::vector<cv::Point2f> ¤t_points)
{
for (size_t i = 0; i < current_points.size(); ++i)
{
if (i < ids.size())
prev_pts_map[ids[i]] = current_points[i];
}
}
void addTrack(int id, const cv::Point2f &pt)
{
ids.push_back(id);
ages.push_back(0);
prev_pts_map[id] = pt;
}
void incrementAges()
{
for (auto &age : ages)
age++;
}
};
struct VisualData
{
std::vector<cv::Point2f> points;
std::vector<int> ids;
std::vector<int> ages;
std::map<int, cv::Point2f> prev_map;
};
static void SortKeypoints(VPIArray keypoints, VPIArray scores, int max)
{
VPIArrayData ptsData, scoresData;
CHECK_STATUS(vpiArrayLockData(keypoints, VPI_LOCK_READ_WRITE, VPI_ARRAY_BUFFER_HOST_AOS, &ptsData));
CHECK_STATUS(vpiArrayLockData(scores, VPI_LOCK_READ_WRITE, VPI_ARRAY_BUFFER_HOST_AOS, &scoresData));
VPIArrayBufferAOS &aosKeypoints = ptsData.buffer.aos;
VPIArrayBufferAOS &aosScores = scoresData.buffer.aos;
std::vector<int> indices(*aosKeypoints.sizePointer);
std::iota(indices.begin(), indices.end(), 0);
uint8_t *scoreBase = (uint8_t *)aosScores.data;
int32_t scoreStride = aosScores.strideBytes;
std::stable_sort(indices.begin(), indices.end(), [&](int a, int b)
{
uint32_t *scoreA = reinterpret_cast<uint32_t *>(scoreBase + a * scoreStride);
uint32_t *scoreB = reinterpret_cast<uint32_t *>(scoreBase + b * scoreStride);
return *scoreA > *scoreB; });
indices.resize(std::min<size_t>(indices.size(), max));
uint8_t *kptBase = (uint8_t *)aosKeypoints.data;
int32_t kptStride = aosKeypoints.strideBytes;
std::vector<VPIKeypointF32> kpt;
kpt.reserve(indices.size());
for (int idx : indices)
{
kpt.push_back(*reinterpret_cast<VPIKeypointF32 *>(kptBase + idx * kptStride));
}
for (size_t i = 0; i < kpt.size(); ++i)
{
*reinterpret_cast<VPIKeypointF32 *>(kptBase + i * kptStride) = kpt[i];
}
*aosKeypoints.sizePointer = kpt.size();
vpiArrayUnlock(scores);
vpiArrayUnlock(keypoints);
}
class VpiLkNode : public rclcpp::Node
{
public:
VpiLkNode() : Node("vpi_lk_comparison"), initialized_(false), global_id_counter_(0)
{
this->declare_parameter("backend", "cuda");
this->declare_parameter("pyramid_levels", 3);
this->declare_parameter("use_timer", false);
std::string backend_str = this->get_parameter("backend").as_string();
backend_ = (backend_str == "cpu") ? VPI_BACKEND_CPU : VPI_BACKEND_CUDA;
pyr_levels_ = this->get_parameter("pyramid_levels").as_int();
use_timer_ = this->get_parameter("use_timer").as_bool();
sub_ = this->create_subscription<sensor_msgs::msg::Image>(
"image_in", rclcpp::SensorDataQoS(), std::bind(&VpiLkNode::imageCallback, this, std::placeholders::_1));
pub_ = this->create_publisher<sensor_msgs::msg::Image>("tracking_comparison", 10);
debug_pub_ = this->create_publisher<sensor_msgs::msg::Image>("vpi_debug_image", 10);
if (use_timer_)
{
timer_ = this->create_wall_timer(std::chrono::milliseconds(33),
std::bind(&VpiLkNode::timerCallback, this));
}
}
~VpiLkNode()
{
if (stream_)
vpiStreamDestroy(stream_);
if (harris_)
vpiPayloadDestroy(harris_);
if (optflow_)
vpiPayloadDestroy(optflow_);
if (pyrPrevFrame_)
vpiPyramidDestroy(pyrPrevFrame_);
if (pyrCurFrame_)
vpiPyramidDestroy(pyrCurFrame_);
if (imgTempFrame_)
vpiImageDestroy(imgTempFrame_);
if (imgFrame_)
vpiImageDestroy(imgFrame_);
if (curFeatures_)
vpiArrayDestroy(curFeatures_);
if (status_)
vpiArrayDestroy(status_);
if (candidates_)
vpiArrayDestroy(candidates_);
if (candidateScores_)
vpiArrayDestroy(candidateScores_);
}
private:
rclcpp::Subscription<sensor_msgs::msg::Image>::SharedPtr sub_;
rclcpp::Publisher<sensor_msgs::msg::Image>::SharedPtr pub_, debug_pub_;
rclcpp::TimerBase::SharedPtr timer_;
VPIBackend backend_;
bool use_timer_;
int pyr_levels_;
std::mutex data_mutex_;
cv::Mat latest_frame_;
bool has_new_frame_ = false;
int img_width_ = 0;
int img_height_ = 0;
// VPI
bool initialized_;
VPIStream stream_ = NULL;
VPIImage imgTempFrame_ = NULL;
VPIImage imgFrame_ = NULL;
VPIPyramid pyrPrevFrame_ = NULL, pyrCurFrame_ = NULL;
VPIArray curFeatures_ = NULL, status_ = NULL;
VPIArray candidates_ = NULL, candidateScores_ = NULL;
VPIPayload optflow_ = NULL, harris_ = NULL;
VPIOpticalFlowPyrLKParams lkParams_;
TrackState vpi_track_state_;
std::vector<VPIKeypointF32> vpi_prev_features_host_;
cv::Mat prev_frame_bgr_;
// OpenCV
cv::Mat cv_prev_gray_;
std::vector<cv::Point2f> cv_prev_pts_, cv_cur_pts_;
TrackState cv_track_state_;
int global_id_counter_;
void initVpi(int cols, int rows)
{
img_width_ = cols;
img_height_ = rows;
CHECK_STATUS(vpiStreamCreate(backend_, &stream_));
cv::Mat dummy = cv::Mat::zeros(rows, cols, CV_8UC3);
CHECK_STATUS(vpiImageCreateWrapperOpenCVMat(dummy, VPI_BACKEND_ALL, &imgTempFrame_));
CHECK_STATUS(vpiImageCreate(cols, rows, VPI_IMAGE_FORMAT_U8, VPI_BACKEND_ALL, &imgFrame_));
CHECK_STATUS(vpiPyramidCreate(cols, rows, VPI_IMAGE_FORMAT_U8, pyr_levels_, 0.5, backend_, &pyrPrevFrame_));
CHECK_STATUS(vpiPyramidCreate(cols, rows, VPI_IMAGE_FORMAT_U8, pyr_levels_, 0.5, backend_, &pyrCurFrame_));
CHECK_STATUS(vpiArrayCreate(MAX_HARRIS_CORNERS, VPI_ARRAY_TYPE_KEYPOINT_F32, VPI_BACKEND_ALL, &curFeatures_));
CHECK_STATUS(vpiArrayCreate(MAX_HARRIS_CORNERS, VPI_ARRAY_TYPE_U8, VPI_BACKEND_ALL, &status_));
CHECK_STATUS(vpiArrayCreate(MAX_HARRIS_CORNERS, VPI_ARRAY_TYPE_KEYPOINT_F32, VPI_BACKEND_ALL, &candidates_));
CHECK_STATUS(vpiArrayCreate(MAX_HARRIS_CORNERS, VPI_ARRAY_TYPE_U32, VPI_BACKEND_ALL, &candidateScores_));
CHECK_STATUS(vpiCreateOpticalFlowPyrLK(backend_, cols, rows, VPI_IMAGE_FORMAT_U8, pyr_levels_, 0.5, &optflow_));
CHECK_STATUS(vpiInitOpticalFlowPyrLKParams(backend_, &lkParams_));
lkParams_.windowDimension = WINDOW_SIZE;
lkParams_.numIterations = MAX_ITERATIONS;
lkParams_.epsilon = EPSILON;
lkParams_.useInitialFlow = 0;
lkParams_.epsilonType = VPI_LK_ERROR_L1;
lkParams_.termination = VPI_TERMINATION_CRITERIA_ITERATIONS; // | VPI_TERMINATION_CRITERIA_EPSILON;
CHECK_STATUS(vpiCreateHarrisCornerDetector(backend_, cols, rows, &harris_));
initialized_ = true;
}
void imageCallback(const sensor_msgs::msg::Image::ConstSharedPtr msg)
{
try
{
cv::Mat frame = cv_bridge::toCvCopy(msg, "bgr8")->image;
if (use_timer_)
{
std::lock_guard<std::mutex> lock(data_mutex_);
latest_frame_ = frame;
has_new_frame_ = true;
}
else
{
processFrame(frame, msg->header);
}
}
catch (cv_bridge::Exception &e)
{
RCLCPP_ERROR(this->get_logger(), "cv_bridge: %s", e.what());
}
}
void timerCallback()
{
cv::Mat frame;
{
std::lock_guard<std::mutex> lock(data_mutex_);
if (!has_new_frame_)
return;
frame = latest_frame_;
has_new_frame_ = false;
}
std_msgs::msg::Header header;
header.stamp = this->now();
header.frame_id = "camera_frame";
processFrame(frame, header);
}
void processFrame(cv::Mat &cvFrame, const std_msgs::msg::Header &header)
{
if (cvFrame.empty())
return;
if (!initialized_)
initVpi(cvFrame.cols, cvFrame.rows);
cv::Mat gray;
cv::cvtColor(cvFrame, gray, cv::COLOR_BGR2GRAY);
// === FIRST FRAME ===
if (cv_prev_gray_.empty())
{
cv_prev_gray_ = gray.clone();
prev_frame_bgr_ = cvFrame.clone();
detectNewFeatures(cvFrame);
extractVpiFeaturesToHost();
cv_prev_pts_ = cv_cur_pts_;
return;
}
// 1. Build pyramids fresh each frame
CHECK_STATUS(vpiImageSetWrappedOpenCVMat(imgTempFrame_, prev_frame_bgr_));
CHECK_STATUS(vpiSubmitConvertImageFormat(stream_, backend_, imgTempFrame_, imgFrame_, NULL));
CHECK_STATUS(vpiSubmitGaussianPyramidGenerator(stream_, backend_, imgFrame_, pyrPrevFrame_, VPI_BORDER_CLAMP));
CHECK_STATUS(vpiStreamSync(stream_));
CHECK_STATUS(vpiImageSetWrappedOpenCVMat(imgTempFrame_, cvFrame));
CHECK_STATUS(vpiSubmitConvertImageFormat(stream_, backend_, imgTempFrame_, imgFrame_, NULL));
CHECK_STATUS(vpiSubmitGaussianPyramidGenerator(stream_, backend_, imgFrame_, pyrCurFrame_, VPI_BORDER_CLAMP));
CHECK_STATUS(vpiStreamSync(stream_));
publishDebugImage(imgFrame_, header);
// 2. Run optical flow if we have previous features
std::vector<cv::Point2f> vpi_cur_pts;
std::vector<uint8_t> vpi_status_host;
if (!vpi_prev_features_host_.empty())
{
VPIArray prevFeatures = NULL;
int32_t nSize = static_cast<int32_t>(vpi_prev_features_host_.size());
VPIArrayData arraydata;
arraydata.bufferType = VPI_ARRAY_BUFFER_HOST_AOS;
arraydata.buffer.aos.type = VPI_ARRAY_TYPE_KEYPOINT_F32;
arraydata.buffer.aos.capacity = nSize;
arraydata.buffer.aos.sizePointer = &nSize;
arraydata.buffer.aos.data = vpi_prev_features_host_.data();
CHECK_STATUS(vpiArrayCreateWrapper(&arraydata, backend_, &prevFeatures));
CHECK_STATUS(vpiSubmitOpticalFlowPyrLK(stream_, backend_, optflow_,
pyrPrevFrame_, pyrCurFrame_,
prevFeatures, curFeatures_,
status_, &lkParams_));
CHECK_STATUS(vpiStreamSync(stream_));
// Download status
VPIArrayData statusData;
CHECK_STATUS(vpiArrayLockData(status_, VPI_LOCK_READ, VPI_ARRAY_BUFFER_HOST_AOS, &statusData));
int statusN = *statusData.buffer.aos.sizePointer;
uint8_t *statusPtr = (uint8_t *)statusData.buffer.aos.data;
vpi_status_host.assign(statusPtr, statusPtr + statusN);
CHECK_STATUS(vpiArrayUnlock(status_));
// Prune and extract
pruneAndExtractVPI(vpi_status_host, vpi_cur_pts);
vpiArrayDestroy(prevFeatures);
}
vpi_track_state_.incrementAges();
// 3. OpenCV optical flow
std::vector<uchar> cv_status;
std::vector<float> cv_err;
if (!cv_prev_pts_.empty())
{
cv::calcOpticalFlowPyrLK(cv_prev_gray_, gray, cv_prev_pts_, cv_cur_pts_,
cv_status, cv_err,
cv::Size(WINDOW_SIZE, WINDOW_SIZE),
pyr_levels_ - 1,
cv::TermCriteria(cv::TermCriteria::COUNT + cv::TermCriteria::EPS,
MAX_ITERATIONS, EPSILON));
}
PruneTracksCV(cv_cur_pts_, cv_status, cv_track_state_);
cv_track_state_.incrementAges();
// 4. Extract visualization data
VisualData vpiData = extractVpiVisData(vpi_cur_pts);
VisualData cvData = extractCvVisData();
size_t vpi_tracked = vpi_cur_pts.size();
size_t cv_tracked = cv_cur_pts_.size();
// 5. Replenish
if (vpi_cur_pts.size() < static_cast<size_t>(MAX_KEYPOINTS))
{
replenishFeaturesOnCurrentFrame(cvFrame, vpi_cur_pts);
}
RCLCPP_INFO_THROTTLE(this->get_logger(), *this->get_clock(), 1000,
"VPI: %zu tracked -> %zu after replenish, CV: %zu tracked -> %zu after replenish",
vpi_tracked, vpi_cur_pts.size(), cv_tracked, cv_cur_pts_.size());
// 6. Draw & Publish
drawAndPublish(cvFrame, vpiData, cvData, header);
// 7. Update history with tracked + replenished points
vpi_track_state_.updateHistory(vpi_cur_pts);
cv_track_state_.updateHistory(cv_cur_pts_);
// 8. Prepare for next frame
vpi_prev_features_host_.clear();
vpi_prev_features_host_.reserve(vpi_cur_pts.size());
for (const auto &pt : vpi_cur_pts)
{
VPIKeypointF32 kp;
kp.x = pt.x;
kp.y = pt.y;
vpi_prev_features_host_.push_back(kp);
}
// 9. Store current frame as previous for next iteration
cv_prev_gray_ = gray.clone();
cv_prev_pts_ = cv_cur_pts_;
prev_frame_bgr_ = cvFrame.clone();
// RCLCPP_INFO_THROTTLE(this->get_logger(), *this->get_clock(), 1000,
// "VPI: %zu tracked, CV: %zu tracked", vpi_cur_pts.size(), cv_cur_pts_.size());
}
void replenishFeaturesOnCurrentFrame(cv::Mat &cvFrame, std::vector<cv::Point2f> &vpi_pts)
{
VPIHarrisCornerDetectorParams harrisParams;
CHECK_STATUS(vpiInitHarrisCornerDetectorParams(&harrisParams));
harrisParams.strengthThresh = 0.01f;
harrisParams.sensitivity = 0.01f;
harrisParams.minNMSDistance = 8.0f;
CHECK_STATUS(vpiSubmitHarrisCornerDetector(stream_, backend_, harris_, imgFrame_,
candidates_, candidateScores_, &harrisParams));
CHECK_STATUS(vpiStreamSync(stream_));
SortKeypoints(candidates_, candidateScores_, MAX_KEYPOINTS);
VPIArrayData candData;
CHECK_STATUS(vpiArrayLockData(candidates_, VPI_LOCK_READ, VPI_ARRAY_BUFFER_HOST_AOS, &candData));
int candN = *candData.buffer.aos.sizePointer;
auto *candBase = (VPIKeypointF32 *)candData.buffer.aos.data;
size_t startN = vpi_pts.size();
size_t curN = vpi_pts.size();
int rejectedTooClose = 0;
for (int i = 0; i < candN && curN < static_cast<size_t>(MAX_KEYPOINTS); ++i)
{
VPIKeypointF32 candPt = candBase[i];
bool isFar = true;
for (const auto &pt : vpi_pts)
{
float dx = candPt.x - pt.x;
float dy = candPt.y - pt.y;
if ((dx * dx + dy * dy) < MIN_DIST_SQ)
{
isFar = false;
rejectedTooClose++;
break;
}
}
if (isFar)
{
cv::Point2f newPt(candPt.x, candPt.y);
vpi_pts.push_back(newPt);
int new_id = global_id_counter_++;
vpi_track_state_.addTrack(new_id, newPt);
cv_cur_pts_.push_back(newPt);
cv_track_state_.addTrack(new_id, newPt);
curN++;
}
}
CHECK_STATUS(vpiArrayUnlock(candidates_));
// RCLCPP_INFO(this->get_logger(),
// "Replenish: Harris found %d candidates, had %zu pts, added %zu, rejected %d (too close), now %zu",
// candN, startN, curN - startN, rejectedTooClose, vpi_pts.size());
}
void detectNewFeatures(cv::Mat &cvFrame)
{
CHECK_STATUS(vpiImageSetWrappedOpenCVMat(imgTempFrame_, cvFrame));
CHECK_STATUS(vpiSubmitConvertImageFormat(stream_, backend_, imgTempFrame_, imgFrame_, NULL));
CHECK_STATUS(vpiStreamSync(stream_));
VPIHarrisCornerDetectorParams harrisParams;
CHECK_STATUS(vpiInitHarrisCornerDetectorParams(&harrisParams));
harrisParams.strengthThresh = 10.0f;
harrisParams.sensitivity = 0.01f;
harrisParams.minNMSDistance = 8.0f;
CHECK_STATUS(vpiSubmitHarrisCornerDetector(stream_, backend_, harris_, imgFrame_,
candidates_, candidateScores_, &harrisParams));
CHECK_STATUS(vpiStreamSync(stream_));
SortKeypoints(candidates_, candidateScores_, MAX_KEYPOINTS);
VPIArrayData candData, curData;
CHECK_STATUS(vpiArrayLockData(candidates_, VPI_LOCK_READ, VPI_ARRAY_BUFFER_HOST_AOS, &candData));
CHECK_STATUS(vpiArrayLockData(curFeatures_, VPI_LOCK_READ_WRITE, VPI_ARRAY_BUFFER_HOST_AOS, &curData));
int candN = *candData.buffer.aos.sizePointer;
auto *candBase = (VPIKeypointF32 *)candData.buffer.aos.data;
auto *curBase = (VPIKeypointF32 *)curData.buffer.aos.data;
int count = std::min(candN, MAX_KEYPOINTS);
for (int i = 0; i < count; ++i)
{
curBase[i] = candBase[i];
int new_id = global_id_counter_++;
vpi_track_state_.addTrack(new_id, cv::Point2f(candBase[i].x, candBase[i].y));
cv_cur_pts_.push_back(cv::Point2f(candBase[i].x, candBase[i].y));
cv_track_state_.addTrack(new_id, cv::Point2f(candBase[i].x, candBase[i].y));
}
*curData.buffer.aos.sizePointer = count;
CHECK_STATUS(vpiArrayUnlock(candidates_));
CHECK_STATUS(vpiArrayUnlock(curFeatures_));
}
void extractVpiFeaturesToHost()
{
VPIArrayData curData;
CHECK_STATUS(vpiArrayLockData(curFeatures_, VPI_LOCK_READ, VPI_ARRAY_BUFFER_HOST_AOS, &curData));
int n = *curData.buffer.aos.sizePointer;
auto *base = (VPIKeypointF32 *)curData.buffer.aos.data;
vpi_prev_features_host_.clear();
vpi_prev_features_host_.reserve(n);
for (int i = 0; i < n; ++i)
{
vpi_prev_features_host_.push_back(base[i]);
}
CHECK_STATUS(vpiArrayUnlock(curFeatures_));
}
void pruneAndExtractVPI(const std::vector<uint8_t> &status, std::vector<cv::Point2f> &out_pts)
{
VPIArrayData curData;
CHECK_STATUS(vpiArrayLockData(curFeatures_, VPI_LOCK_READ, VPI_ARRAY_BUFFER_HOST_AOS, &curData));
int n = *curData.buffer.aos.sizePointer;
auto *base = (VPIKeypointF32 *)curData.buffer.aos.data;
out_pts.clear();
std::vector<int> nextIds, nextAges;
int trackedCount = 0, lostCount = 0, oobCount = 0;
// Get image dimensions
int imgW = img_width_;
int imgH = img_height_;
for (int i = 0; i < n && i < (int)status.size(); ++i)
{
if (status[i] == 0 && i < (int)vpi_track_state_.ids.size())
{
// Check if point is within image bounds
float x = base[i].x;
float y = base[i].y;
if (x < 0 || x >= imgW || y < 0 || y >= imgH)
{
oobCount++;
continue; // Skip out-of-bounds points
}
out_pts.push_back(cv::Point2f(x, y));
nextIds.push_back(vpi_track_state_.ids[i]);
nextAges.push_back(vpi_track_state_.ages[i]);
trackedCount++;
}
else
{
lostCount++;
}
}
CHECK_STATUS(vpiArrayUnlock(curFeatures_));
RCLCPP_INFO(this->get_logger(), "VPI prune: %d tracked, %d lost, %d OOB",
trackedCount, lostCount, oobCount);
vpi_track_state_.ids = nextIds;
vpi_track_state_.ages = nextAges;
}
void replenishFeatures(cv::Mat &cvFrame, std::vector<cv::Point2f> &vpi_pts)
{
CHECK_STATUS(vpiImageSetWrappedOpenCVMat(imgTempFrame_, cvFrame));
CHECK_STATUS(vpiSubmitConvertImageFormat(stream_, backend_, imgTempFrame_, imgFrame_, NULL));
CHECK_STATUS(vpiStreamSync(stream_));
VPIHarrisCornerDetectorParams harrisParams;
CHECK_STATUS(vpiInitHarrisCornerDetectorParams(&harrisParams));
harrisParams.strengthThresh = 10.0f;
harrisParams.sensitivity = 0.01f;
harrisParams.minNMSDistance = 8.0f;
CHECK_STATUS(vpiSubmitHarrisCornerDetector(stream_, backend_, harris_, imgFrame_,
candidates_, candidateScores_, &harrisParams));
CHECK_STATUS(vpiStreamSync(stream_));
SortKeypoints(candidates_, candidateScores_, MAX_KEYPOINTS);
VPIArrayData candData;
CHECK_STATUS(vpiArrayLockData(candidates_, VPI_LOCK_READ, VPI_ARRAY_BUFFER_HOST_AOS, &candData));
int candN = *candData.buffer.aos.sizePointer;
auto *candBase = (VPIKeypointF32 *)candData.buffer.aos.data;
int curN = vpi_pts.size();
for (int i = 0; i < candN && curN < MAX_KEYPOINTS; ++i)
{
VPIKeypointF32 candPt = candBase[i];
bool isFar = true;
for (const auto &pt : vpi_pts)
{
float dx = candPt.x - pt.x;
float dy = candPt.y - pt.y;
if ((dx * dx + dy * dy) < MIN_DIST_SQ)
{
isFar = false;
break;
}
}
if (isFar)
{
cv::Point2f newPt(candPt.x, candPt.y);
vpi_pts.push_back(newPt);
int new_id = global_id_counter_++;
vpi_track_state_.addTrack(new_id, newPt);
cv_cur_pts_.push_back(newPt);
cv_track_state_.addTrack(new_id, newPt);
curN++;
}
}
CHECK_STATUS(vpiArrayUnlock(candidates_));
}
void PruneTracksCV(std::vector<cv::Point2f> &pts, const std::vector<uchar> &status, TrackState &state)
{
if (status.empty())
return;
size_t writeIdx = 0;
for (size_t i = 0; i < pts.size() && i < status.size(); ++i)
{
if (status[i] == 1 && i < state.ids.size())
{
if (writeIdx != i)
{
pts[writeIdx] = pts[i];
state.ids[writeIdx] = state.ids[i];
state.ages[writeIdx] = state.ages[i];
}
writeIdx++;
}
}
pts.resize(writeIdx);
state.ids.resize(writeIdx);
state.ages.resize(writeIdx);
}
VisualData extractVpiVisData(const std::vector<cv::Point2f> &pts)
{
VisualData data;
data.points = pts;
data.ids = vpi_track_state_.ids;
data.ages = vpi_track_state_.ages;
data.prev_map = vpi_track_state_.prev_pts_map;
return data;
}
VisualData extractCvVisData()
{
VisualData data;
data.points = cv_cur_pts_;
data.ids = cv_track_state_.ids;
data.ages = cv_track_state_.ages;
data.prev_map = cv_track_state_.prev_pts_map;
return data;
}
void publishDebugImage(VPIImage vpiImg, const std_msgs::msg::Header &header)
{
if (debug_pub_->get_subscription_count() == 0)
return;
VPIImageFormat fmt;
vpiImageGetFormat(vpiImg, &fmt);
int w, h;
vpiImageGetSize(vpiImg, &w, &h);
cv::Mat outMat;
if (fmt == VPI_IMAGE_FORMAT_U8)
outMat.create(h, w, CV_8UC1);
else
return;
VPIImageData data;
vpiImageLockData(vpiImg, VPI_LOCK_READ, VPI_IMAGE_BUFFER_HOST_PITCH_LINEAR, &data);
for (int i = 0; i < h; ++i)
{
memcpy(outMat.ptr(i), (uint8_t *)data.buffer.pitch.planes[0].data + i * data.buffer.pitch.planes[0].pitchBytes, w);
}
vpiImageUnlock(vpiImg);
debug_pub_->publish(*cv_bridge::CvImage(header, "mono8", outMat).toImageMsg());
}
void drawAndPublish(const cv::Mat &src, const VisualData &vpiData, const VisualData &cvData,
const std_msgs::msg::Header &header)
{
cv::Mat vpiImg = src.clone();
cv::Mat cvImg = src.clone();
auto draw = [&](cv::Mat &img, const VisualData &d, const std::string &lbl)
{
cv::putText(img, lbl + ": " + std::to_string(d.points.size()), cv::Point(10, 30),
cv::FONT_HERSHEY_SIMPLEX, 0.7, cv::Scalar(0, 255, 0), 2);
for (size_t i = 0; i < d.points.size(); ++i)
{
if (i >= d.ages.size() || i >= d.ids.size())
continue;
double len = std::min(1.0, 1.0 * d.ages[i] / 50.0);
cv::Scalar color(255 * (1 - len), 0, 255 * len);
cv::circle(img, d.points[i], 2, color, 2);
int id = d.ids[i];
auto iter = d.prev_map.find(id);
if (iter != d.prev_map.end())
{
cv::arrowedLine(img, iter->second, d.points[i], cv::Scalar(0, 255, 0), 1, cv::LINE_8, 0, 0.3f);
}
}
};
draw(vpiImg, vpiData, "VPI (CUDA)");
draw(cvImg, cvData, "OpenCV (CPU)");
cv::Mat combined;
cv::hconcat(vpiImg, cvImg, combined);
pub_->publish(*cv_bridge::CvImage(header, "bgr8", combined).toImageMsg());
}
};
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<VpiLkNode>());
rclcpp::shutdown();
return 0;
}

