Hey,
I’m trying to play with the OmniIsaacGymEnvs framework. My goal is to learn to a turltebot 2 to go to a position. I’m encountering few problems that I cannot solve as a beginner. Here is the code I use to create my scene :
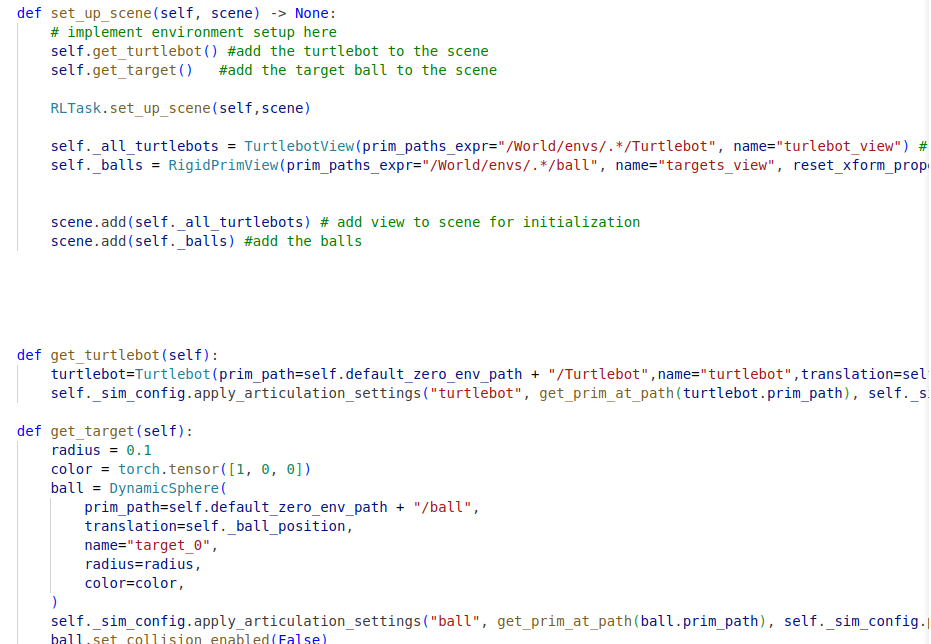
As a result, all of my turtlebots inside my simulation are falling. When i remove the “scene.add …”, the collision between the turtlebots and the ground is working.
So i found a solution : manually untick the checkbox “enable colision” of the ground plane and tick again it (when the simulation has already start). But I don’t think it’s a convenient way, and i don’t know how to do this in my code with the python API.
Do you guys have a solution ?
thanks a lot,
Axel