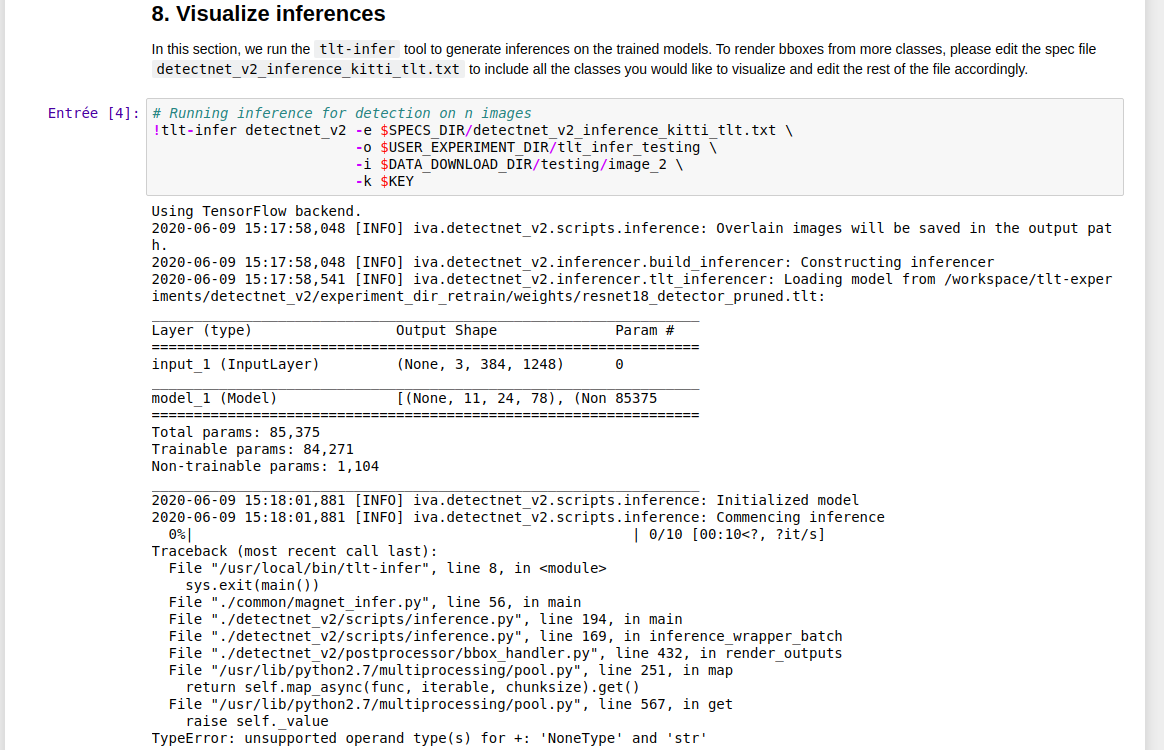
Hi everyone, I’m training a Detectnet_v2 model on Tlt and apparently everything went fine until the inference command it shows this
My goal is to train a model to use in Isaac SDK so I’m following its tutorial
I can’t put my spec file as a new user but I checked it many times and it looks fine because I only used the default config unless this error means there is something wrong with it
I don’t know what to do can anyone help me please
Could you please paste your detectnet_v2_inference_kitti_tlt.txt here?
Sure
inferencer_config{
defining target class names for the experiment.
Note: This must be mentioned in order of the networks classes.
target_classes: “car”
target_classes: “cyclist”
target_classes: “pedestrian”
target_classes: “dolly”
target_classes: “cardbox”
target_classes: “trafficcone”
target_classes: “wetfloorsign”
target_classes: “lampceiling”
target_classes: “pallet”
target_classes: “floordecale”
target_classes: “extinguisher”
Inference dimensions.
image_width: 1248
image_height: 384
Must match what the model was trained for.
image_channels: 3
batch_size: 10
gpu_index: 0
model handler config
tlt_config{
model: “/workspace/tlt-experiments/detectnet_v2/experiment_dir_retrain/weights/resnet18_detector_pruned.tlt”
}
}
bbox_handler_config{
kitti_dump: true
disable_overlay: false
overlay_linewidth: 2
classwise_bbox_handler_config{
key:“car”
value: {
confidence_model: “aggregate_cov”
output_map: “person”
confidence_threshold: 0.9
bbox_color{
R: 0
G: 255
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“cyclist”
value: {
confidence_model: “aggregate_cov”
output_map: “bag”
confidence_threshold: 0.9
bbox_color{
R: 0
G: 255
B: 255
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“pedestrian”
value: {
confidence_model: “aggregate_cov”
output_map: “face”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“default”
value: {
confidence_model: “aggregate_cov”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“dolly”
value: {
confidence_model: “aggregate_cov”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“cardbox”
value: {
confidence_model: “aggregate_cov”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“trafficcone”
value: {
confidence_model: “aggregate_cov”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“wetfloorsign”
value: {
confidence_model: “aggregate_cov”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“lampceiling”
value: {
confidence_model: “aggregate_cov”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“pallet”
value: {
confidence_model: “aggregate_cov”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“floordecale”
value: {
confidence_model: “aggregate_cov”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
classwise_bbox_handler_config{
key:“extinguisher”
value: {
confidence_model: “aggregate_cov”
confidence_threshold: 0.9
bbox_color{
R: 255
G: 0
B: 0
}
clustering_config{
coverage_threshold: 0.00
dbscan_eps: 0.3
dbscan_min_samples: 0.05
minimum_bounding_box_height: 4
}
}
}
}
Thank you
In your config file, I can see there are 11 classes.
But actually how many classes did you train?
Also, in default config file inside the docker, there is an issue for car/cyclist/pedestrian. The key does not match output_map.
key:“car”
value: {
confidence_model: “aggregate_cov”
output_map: “person”
should be
key:“car”
value: {
confidence_model: “aggregate_cov”
output_map: “car”
Please modify the three classes.
I changed the output_map but the error persist, I trained 11 classes, although some of them are with 0 precision
Here is my spec file for training, for retraining it’s basically the same
random_seed: 42
dataset_config {
data_sources {
tfrecords_path: “/workspace/tlt-experiments/unity3d_kitti_dataset/tfrecords/kitti_trainval/*”
image_directory_path: “/workspace/tlt-experiments/unity3d_kitti_dataset/training”
}
image_extension: “png”
target_class_mapping {
key: “car”
value: “car”
}
target_class_mapping {
key: “cyclist”
value: “cyclist”
}
target_class_mapping {
key: “pedestrian”
value: “pedestrian”
}
target_class_mapping {
key: “person_sitting”
value: “pedestrian”
}
target_class_mapping {
key: “van”
value: “car”
}
target_class_mapping {
key: “dolly”
value: “dolly”
}
target_class_mapping {
key: “cardbox”
value: “cardbox”
}
target_class_mapping {
key: “trafficcone”
value: “trafficcone”
}
target_class_mapping {
key: “wetfloorsign”
value: “wetfloorsign”
}
target_class_mapping {
key: “lampceiling”
value: “lampceiling”
}
target_class_mapping {
key: “pallet”
value: “pallet”
}
target_class_mapping {
key: “floordecale”
value: “floordecale”
}
target_class_mapping {
key: “extinguisher”
value: “extinguisher”
}
validation_fold: 0
}
augmentation_config {
preprocessing {
output_image_width: 1248
output_image_height: 384
min_bbox_width: 1.0
min_bbox_height: 1.0
output_image_channel: 3
}
spatial_augmentation {
hflip_probability: 0.5
zoom_min: 1.0
zoom_max: 1.0
translate_max_x: 8.0
translate_max_y: 8.0
}
color_augmentation {
hue_rotation_max: 25.0
saturation_shift_max: 0.20000000298
contrast_scale_max: 0.10000000149
contrast_center: 0.5
}
}
postprocessing_config {
target_class_config {
key: “car”
value {
clustering_config {
coverage_threshold: 0.00499999988824
dbscan_eps: 0.20000000298
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “cyclist”
value {
clustering_config {
coverage_threshold: 0.00499999988824
dbscan_eps: 0.15000000596
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “pedestrian”
value {
clustering_config {
coverage_threshold: 0.00749999983236
dbscan_eps: 0.230000004172
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “dolly”
value {
clustering_config {
coverage_threshold: 0.00749999983236
dbscan_eps: 0.230000004172
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “cardbox”
value {
clustering_config {
coverage_threshold: 0.00749999983236
dbscan_eps: 0.230000004172
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “trafficcone”
value {
clustering_config {
coverage_threshold: 0.00749999983236
dbscan_eps: 0.230000004172
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “wetfloorsign”
value {
clustering_config {
coverage_threshold: 0.00749999983236
dbscan_eps: 0.230000004172
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “lampceiling”
value {
clustering_config {
coverage_threshold: 0.00749999983236
dbscan_eps: 0.230000004172
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “pallet”
value {
clustering_config {
coverage_threshold: 0.00749999983236
dbscan_eps: 0.230000004172
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “floordecale”
value {
clustering_config {
coverage_threshold: 0.00749999983236
dbscan_eps: 0.230000004172
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
target_class_config {
key: “extinguisher”
value {
clustering_config {
coverage_threshold: 0.00749999983236
dbscan_eps: 0.230000004172
dbscan_min_samples: 0.0500000007451
minimum_bounding_box_height: 20
}
}
}
}
model_config {
pretrained_model_file: “/workspace/tlt-experiments/detectnet_v2/pretrained_resnet18/tlt_pretrained_detectnet_v2_vresnet18/resnet18.hdf5”
num_layers: 18
use_batch_norm: true
objective_set {
bbox {
scale: 35.0
offset: 0.5
}
cov {
}
}
training_precision {
backend_floatx: FLOAT32
}
arch: “resnet”
}
evaluation_config {
validation_period_during_training: 10
first_validation_epoch: 30
minimum_detection_ground_truth_overlap {
key: “car”
value: 0.699999988079
}
minimum_detection_ground_truth_overlap {
key: “cyclist”
value: 0.5
}
minimum_detection_ground_truth_overlap {
key: “pedestrian”
value: 0.5
}
minimum_detection_ground_truth_overlap {
key: “dolly”
value: 0.5
}
minimum_detection_ground_truth_overlap {
key: “cardbox”
value: 0.5
}
minimum_detection_ground_truth_overlap {
key: “trafficcone”
value: 0.5
}
minimum_detection_ground_truth_overlap {
key: “wetfloorsign”
value: 0.5
}
minimum_detection_ground_truth_overlap {
key: “lampceiling”
value: 0.5
}
minimum_detection_ground_truth_overlap {
key: “pallet”
value: 0.5
}
minimum_detection_ground_truth_overlap {
key: “floordecale”
value: 0.5
}
minimum_detection_ground_truth_overlap {
key: “extinguisher”
value: 0.5
}
evaluation_box_config {
key: “car”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “cyclist”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “pedestrian”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “dolly”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “cardbox”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “trafficcone”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “wetfloorsign”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “lampceiling”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “pallet”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “floordecale”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
evaluation_box_config {
key: “extinguisher”
value {
minimum_height: 20
maximum_height: 9999
minimum_width: 10
maximum_width: 9999
}
}
average_precision_mode: INTEGRATE
}
cost_function_config {
target_classes {
name: “car”
class_weight: 1.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
target_classes {
name: “cyclist”
class_weight: 8.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 1.0
}
}
target_classes {
name: “pedestrian”
class_weight: 4.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
target_classes {
name: “dolly”
class_weight: 4.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
target_classes {
name: “cardbox”
class_weight: 4.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
target_classes {
name: “trafficcone”
class_weight: 4.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
target_classes {
name: “wetfloorsign”
class_weight: 4.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
target_classes {
name: “lampceiling”
class_weight: 4.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
target_classes {
name: “pallet”
class_weight: 4.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
target_classes {
name: “floordecale”
class_weight: 4.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
target_classes {
name: “extinguisher”
class_weight: 4.0
coverage_foreground_weight: 0.0500000007451
objectives {
name: “cov”
initial_weight: 1.0
weight_target: 1.0
}
objectives {
name: “bbox”
initial_weight: 10.0
weight_target: 10.0
}
}
enable_autoweighting: true
max_objective_weight: 0.999899983406
min_objective_weight: 9.99999974738e-05
}
training_config {
batch_size_per_gpu: 10
num_epochs: 100
learning_rate {
soft_start_annealing_schedule {
min_learning_rate: 5e-06
max_learning_rate: 5e-04
soft_start: 0.10000000149
annealing: 0.699999988079
}
}
regularizer {
type: L1
weight: 3.00000002618e-09
}
optimizer {
adam {
epsilon: 9.99999993923e-09
beta1: 0.899999976158
beta2: 0.999000012875
}
}
cost_scaling {
initial_exponent: 20.0
increment: 0.005
decrement: 1.0
}
checkpoint_interval: 10
}
bbox_rasterizer_config {
target_class_config {
key: “car”
value {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 0.40000000596
cov_radius_y: 0.40000000596
bbox_min_radius: 1.0
}
}
target_class_config {
key: “cyclist”
value {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 1.0
cov_radius_y: 1.0
bbox_min_radius: 1.0
}
}
target_class_config {
key: “pedestrian”
value {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 1.0
cov_radius_y: 1.0
bbox_min_radius: 1.0
}
}
target_class_config {
key: “dolly”
value: {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 0.4
cov_radius_y: 0.4
bbox_min_radius: 1.0
}
}
target_class_config {
key: “cardbox”
value: {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 0.4
cov_radius_y: 0.4
bbox_min_radius: 1.0
}
}
target_class_config {
key: “trafficcone”
value: {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 0.4
cov_radius_y: 0.4
bbox_min_radius: 1.0
}
}
target_class_config {
key: “wetfloorsign”
value: {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 0.4
cov_radius_y: 0.4
bbox_min_radius: 1.0
}
}
target_class_config {
key: “lampceiling”
value: {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 0.4
cov_radius_y: 0.4
bbox_min_radius: 1.0
}
}
target_class_config {
key: “pallet”
value: {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 0.4
cov_radius_y: 0.4
bbox_min_radius: 1.0
}
}
target_class_config {
key: “floordecale”
value: {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 0.4
cov_radius_y: 0.4
bbox_min_radius: 1.0
}
}
target_class_config {
key: “extinguisher”
value: {
cov_center_x: 0.5
cov_center_y: 0.5
cov_radius_x: 0.4
cov_radius_y: 0.4
bbox_min_radius: 1.0
}
}
deadzone_radius: 0.400000154972
}
Solved, had to add output_map parameter to all the target classes
Thank you