I’ve learned to leverage pytorch DDP and nccl backed to execute training on multi-gpu bit single node. Here is the tutorial and the python code
https://pytorch.org/tutorials/beginner/ddp_series_multigpu.html
import torch
import torch.nn.functional as F
from torch.utils.data import Dataset, DataLoader
from datautils import MyTrainDataset
import torch.multiprocessing as mp
from torch.utils.data.distributed import DistributedSampler
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.distributed import init_process_group, destroy_process_group
import os
def ddp_setup(rank, world_size):
"""
Args:
rank: Unique identifier of each process
world_size: Total number of processes
"""
os.environ["MASTER_ADDR"] = "localhost"
os.environ["MASTER_PORT"] = "12355"
init_process_group(backend="nccl", rank=rank, world_size=world_size)
torch.cuda.set_device(rank)
class Trainer:
def __init__(
self,
model: torch.nn.Module,
train_data: DataLoader,
optimizer: torch.optim.Optimizer,
gpu_id: int,
save_every: int,
) -> None:
self.gpu_id = gpu_id
self.model = model.to(gpu_id)
self.train_data = train_data
self.optimizer = optimizer
self.save_every = save_every
self.model = DDP(model, device_ids=[gpu_id])
def _run_batch(self, source, targets):
self.optimizer.zero_grad()
output = self.model(source)
loss = F.cross_entropy(output, targets)
loss.backward()
self.optimizer.step()
def _run_epoch(self, epoch):
b_sz = len(next(iter(self.train_data))[0])
print(f"[GPU{self.gpu_id}] Epoch {epoch} | Batchsize: {b_sz} | Steps: {len(self.train_data)}")
self.train_data.sampler.set_epoch(epoch)
for source, targets in self.train_data:
source = source.to(self.gpu_id)
targets = targets.to(self.gpu_id)
self._run_batch(source, targets)
def _save_checkpoint(self, epoch):
ckp = self.model.module.state_dict()
PATH = "checkpoint.pt"
torch.save(ckp, PATH)
print(f"Epoch {epoch} | Training checkpoint saved at {PATH}")
def train(self, max_epochs: int):
for epoch in range(max_epochs):
self._run_epoch(epoch)
if self.gpu_id == 0 and epoch % self.save_every == 0:
self._save_checkpoint(epoch)
def load_train_objs():
train_set = MyTrainDataset(2048) # load your dataset
model = torch.nn.Linear(20, 1) # load your model
optimizer = torch.optim.SGD(model.parameters(), lr=1e-3)
return train_set, model, optimizer
def prepare_dataloader(dataset: Dataset, batch_size: int):
return DataLoader(
dataset,
batch_size=batch_size,
pin_memory=True,
shuffle=False,
sampler=DistributedSampler(dataset)
)
def main(rank: int, world_size: int, save_every: int, total_epochs: int, batch_size: int):
ddp_setup(rank, world_size)
dataset, model, optimizer = load_train_objs()
train_data = prepare_dataloader(dataset, batch_size)
trainer = Trainer(model, train_data, optimizer, rank, save_every)
trainer.train(total_epochs)
destroy_process_group()
if __name__ == "__main__":
import argparse
parser = argparse.ArgumentParser(description='simple distributed training job')
parser.add_argument('total_epochs', type=int, help='Total epochs to train the model')
parser.add_argument('save_every', type=int, help='How often to save a snapshot')
parser.add_argument('--batch_size', default=32, type=int, help='Input batch size on each device (default: 32)')
args = parser.parse_args()
world_size = torch.cuda.device_count()
mp.spawn(main, args=(world_size, args.save_every, args.total_epochs, args.batch_size), nprocs=world_size)
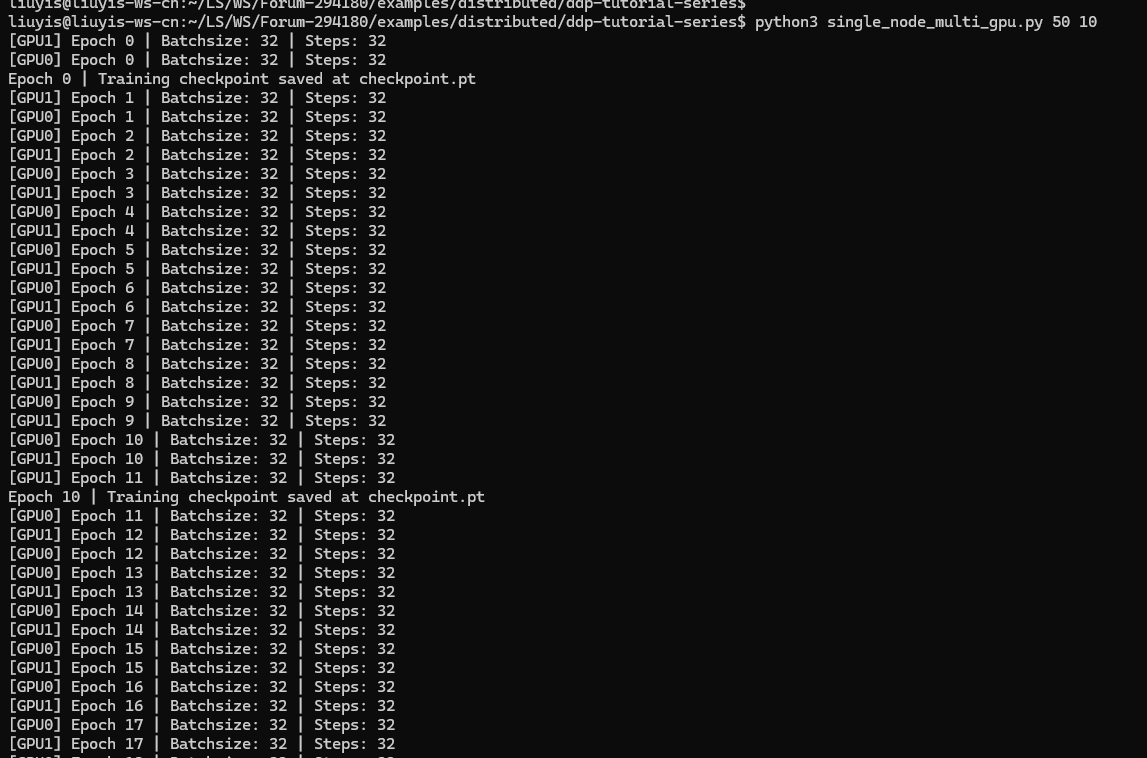
In my case, there are 2 GPUs in a node.
If I execute it through command python directly, I can see GPU0, GPU1 inter-execute
However, if I execute with nsys profile command, GPU0 or GPU1 won’t take turn until one GPU finished, another just can execute. It is like locking mechanism.
Does anyone know how to make GPU take turn to execute with nsys profile?