I have always wanted to build a robot using AI thinking about how cool it could be.
I am trying to go with a not so uncanny design like a dog or something how ever it could still be weird as I want to make it Bipedal.
The Goal is to try and replicate real voice with a spring that vibrates at a pleasant resonance frequency and use a tongue, lips and it’s jaw all actuated by servo to form words like we do.
This is in very early stages of V2. I built V1 three years ago and never came close because I gave up ai was so expensive those days now thanks to Nvidia even the Jetson Nano I am using for this is light-years ahead of anything affordable 3 years ago.
Goals with this robot.
- Using it’s ears with microphones to try and locate sound. For example if you are next to the robot and ask it a question it will turn to you.
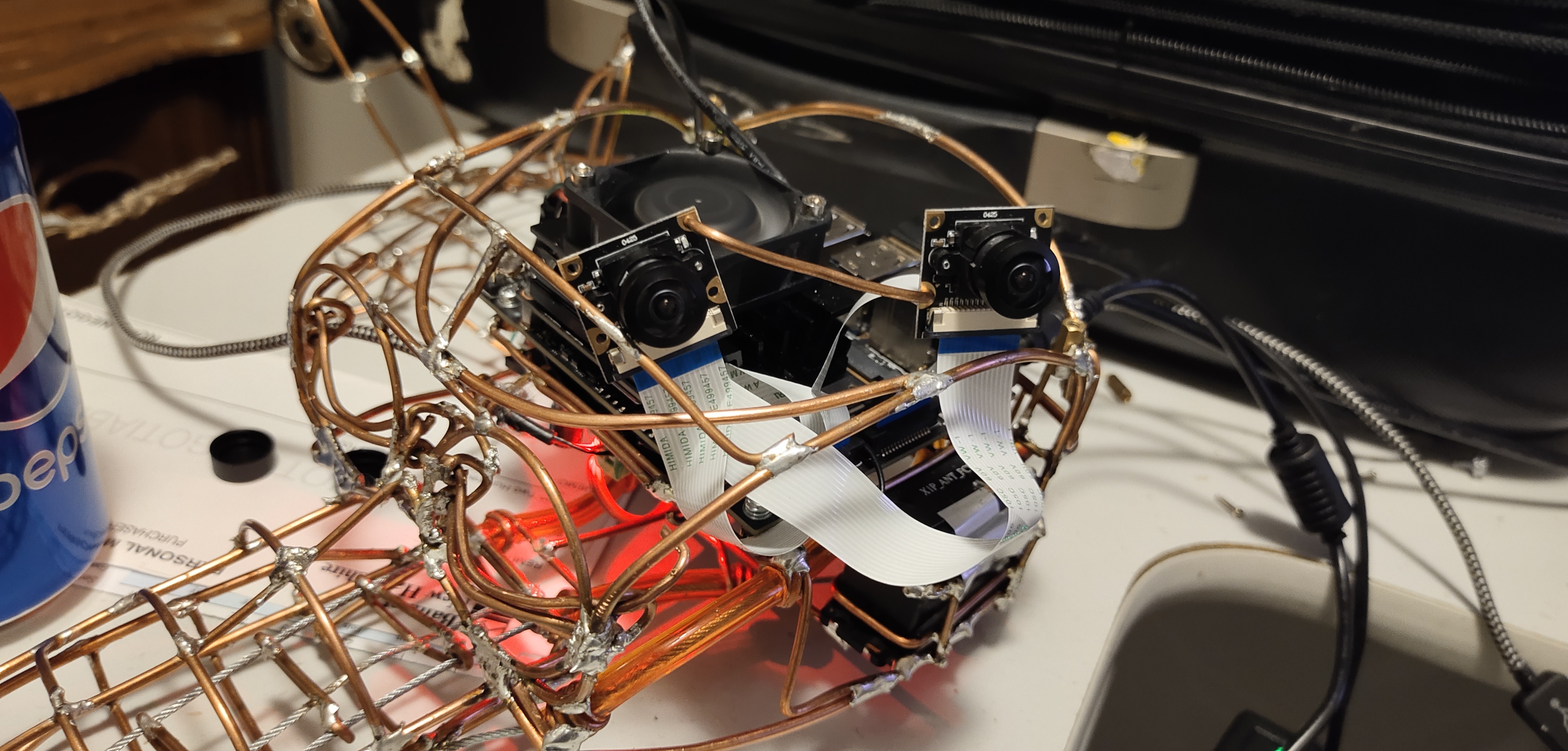
- Using cameras in clear epoxy eyes with a mechanism to look up down left right with recognition.
- I2C IMUs in several parts of it’s body for simulated balance.
- Pressure sensors in it’s feet to hopefully help it walk.
And so much more I think I need to buy the new Jetson Xavier NX Developer Kit instead of the nano. I have 38 servos, 2 RPI Camera modules, Clear epoxy and much more coming in the mail I can’t wait. All of this may saturate the nanos abilities pretty quickly.
Google Photo https://photos.app.goo.gl/yMMEY1Jy3YCL5VX58
3 Likes
Thank you!! I hope to get more done in the next few days hopefully getting more movement. Here’s a YouTube link. 1st moving part. - YouTube
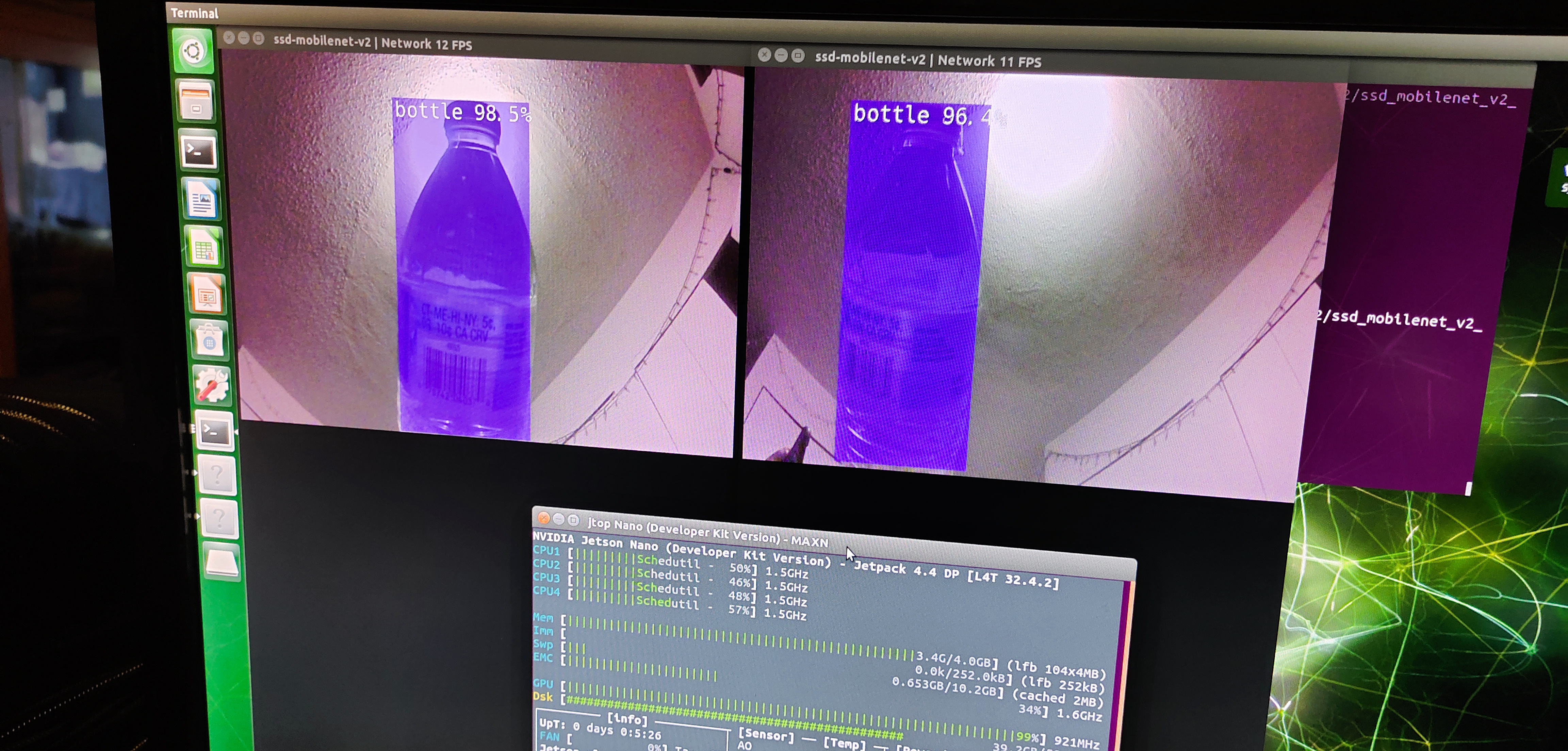
Update received 18 micro servos, I2C IMU and the two PI cameras V2. Experimented with Inference pretty cool stuff I am going to need more power as one camera will be Yolo and the other camera may be Gesture recognition. Not sure yet might need 3d mapping.
More movement not really as fast as I want it but hey it’s a start. I also wanted to test Inference with I2C control to see if anything will lag but worked great.
YouTube video. Robot movement 2 - YouTube
And another update ear movement. YouTube Robot movement 3 - YouTube
Neck movement YouTube. Definitely needs tuning like most of it.
2 Likes
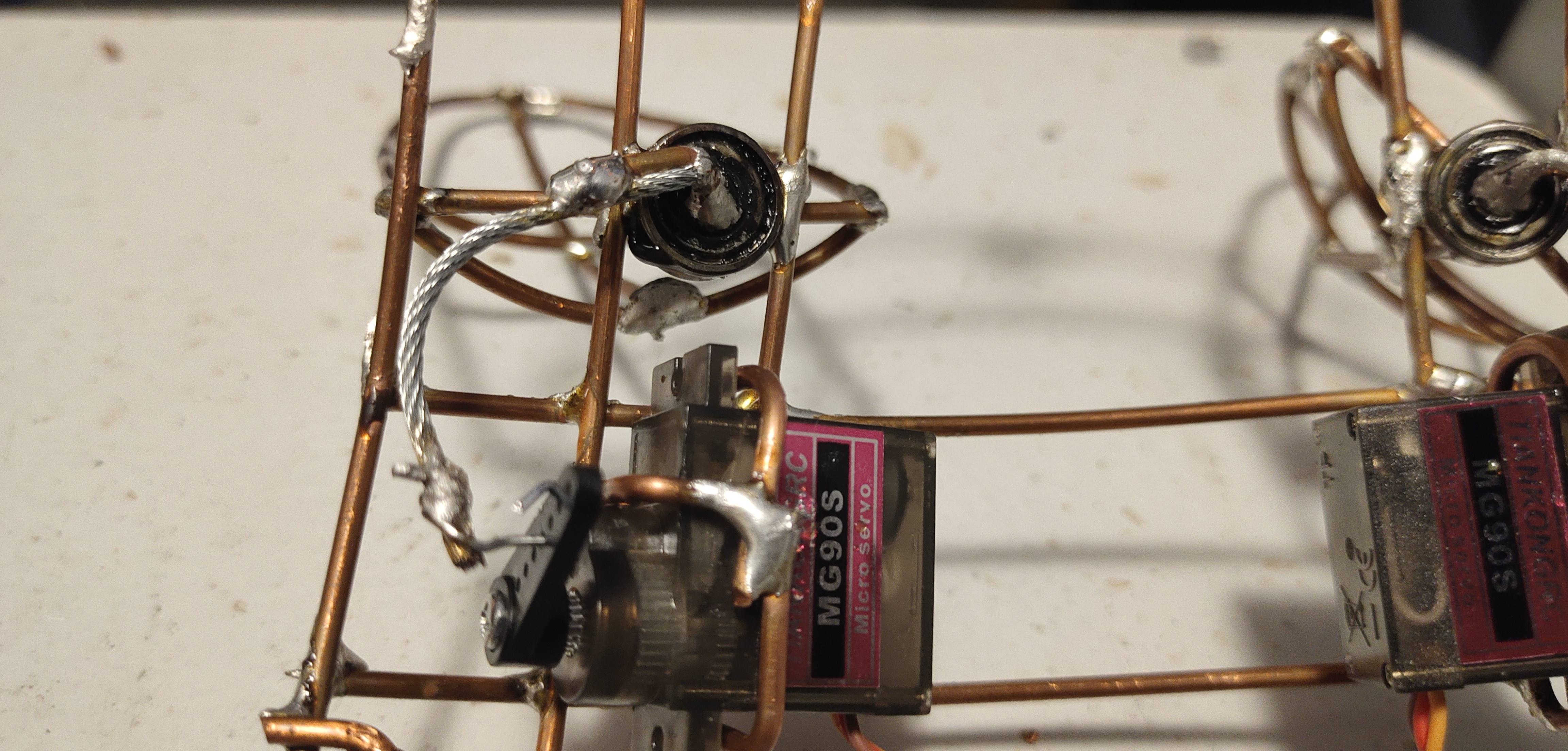
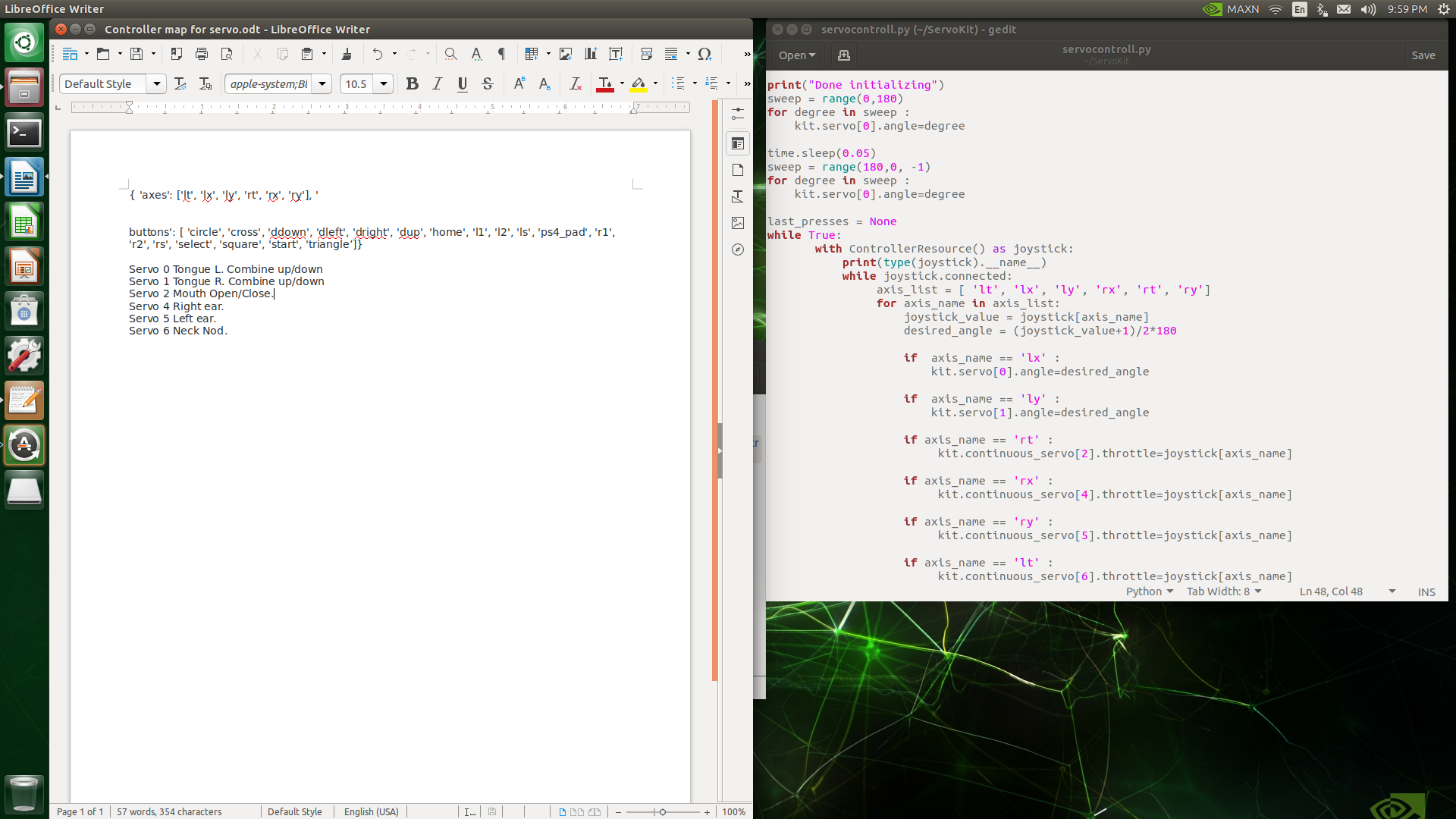
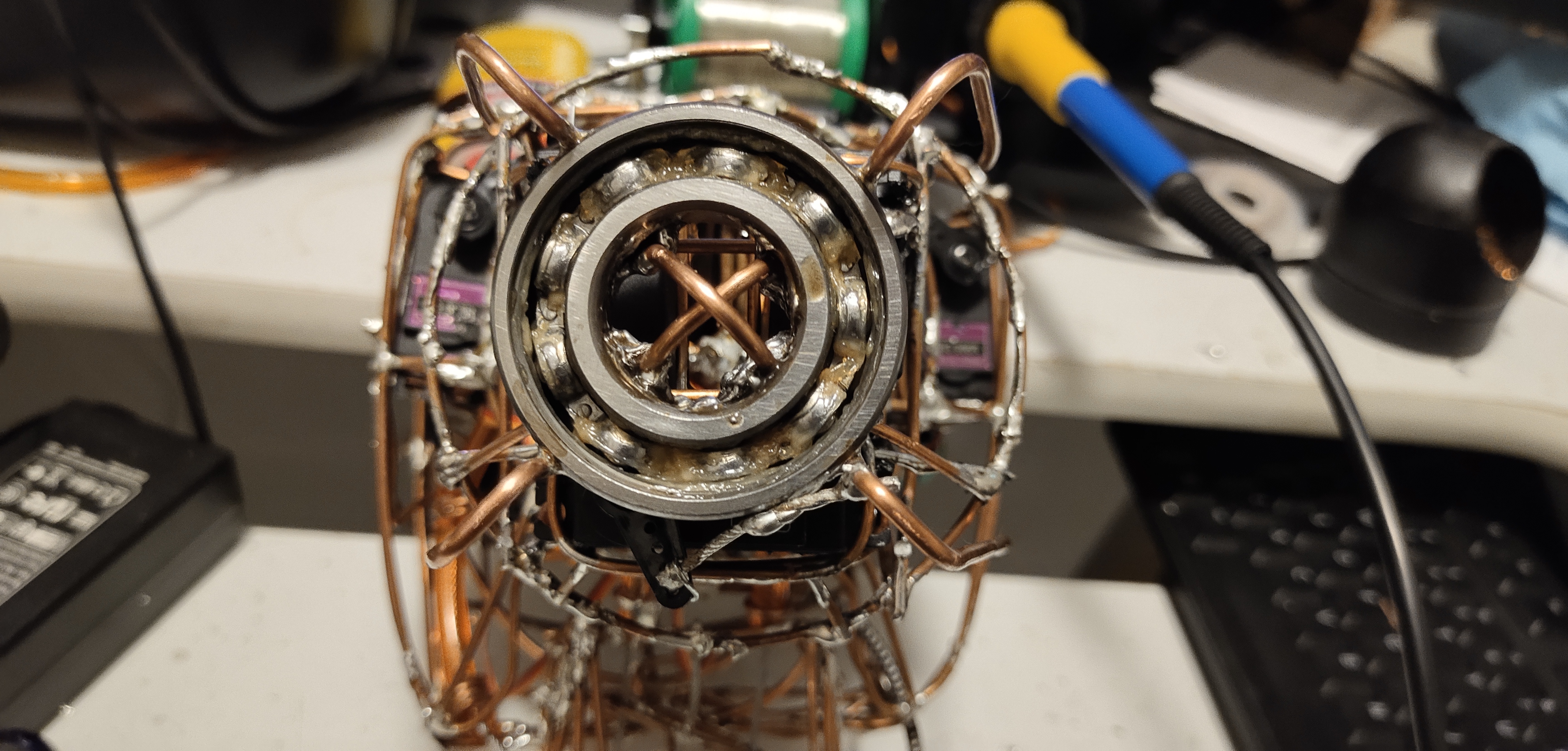
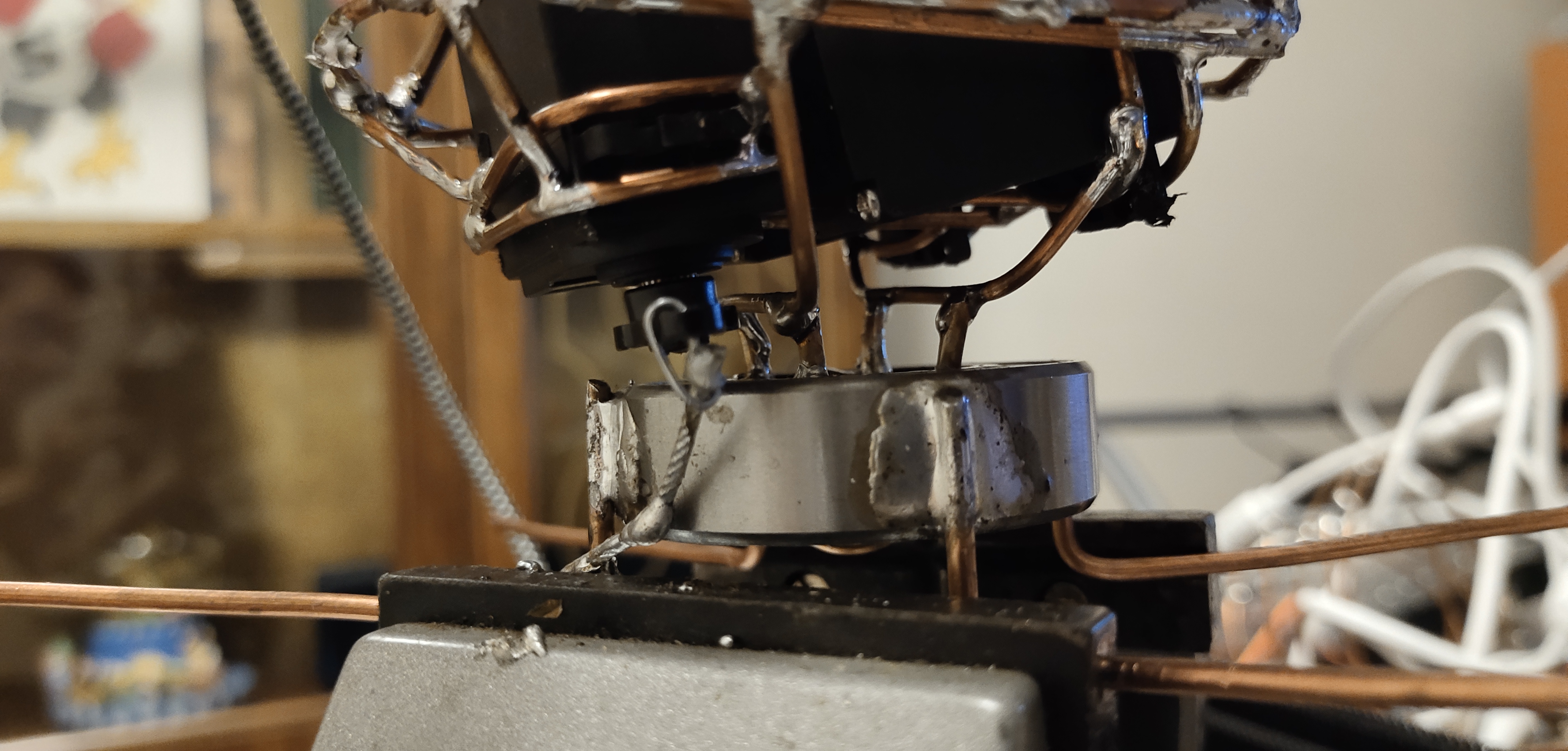
Tried the cable spine approach for it’s neck but it was like a new born baby too wobbly and fragile. So I grabbed a few ball bearings and soldered a pretty solid neck mechanism and was able to make it more compact. I am still waiting for epoxy resin and eye molds so I can create the eye mechanism and finish it’s head and I hope to use I2C through out it’s body but I worry it will be glitchy because of cable length.
2 Likes
A bit of an update got some of it’s chest done and starting on shoulders still waiting for epoxy resin all though I think I got ripped off on eBay lol. I am thinking about using 4- 3s lipo batteries for over 20Ahr of capacity to start with and I need to research big 40kg+ servos for arms and 100kg+ servos for legs. I also started working with different types of silicone for it’s skin. There is so much work not to mention figuring out programming ugh.
A little more done I don’t know if these cheap servos will carry the weight we will see.