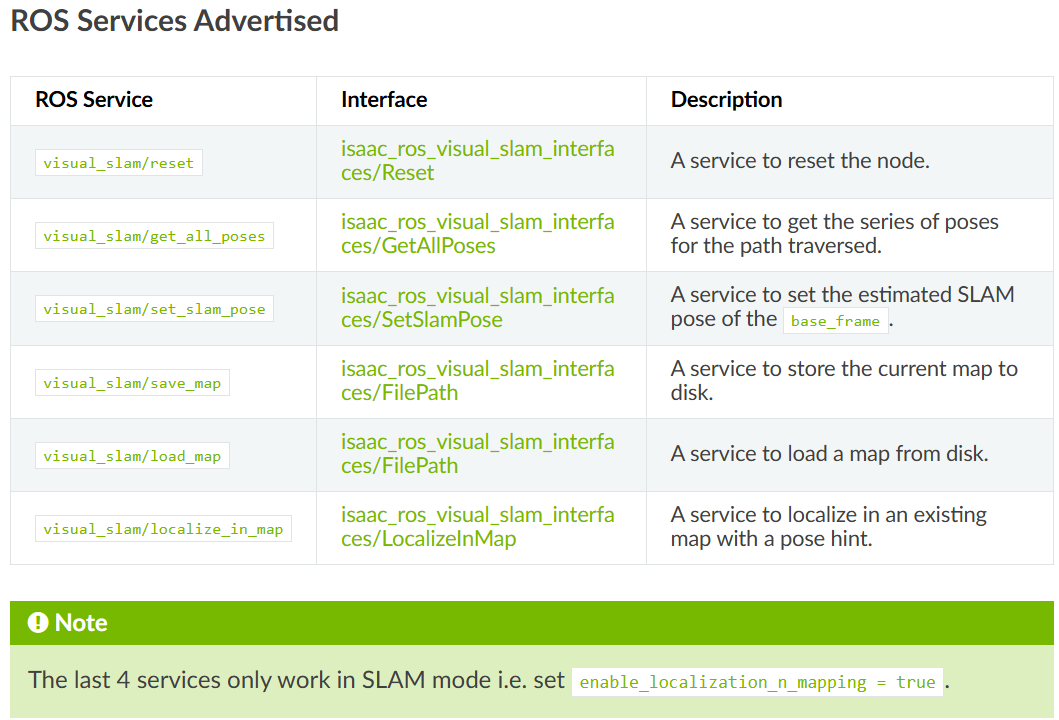
I am using isaac_ros_visaul_slam, and I want to save the map that I create, how to use the ros2 action or service?
And I have seen this to set the parameter"enable_localization_n_mapping = true", where I can set it?
Yes, you need to read if the parameter is set with the right value with the command:
ros2 service call <service_name> <service_type>
Another way to check if all parameters are correctly configured, if you have a UI, is to run rqt_reconfigure, which will open a GUI where you can read live the status of all parameters set on your device.
ros2 run rqt_reconfigure rqt_reconfigure