
Can work in
realsense-viewer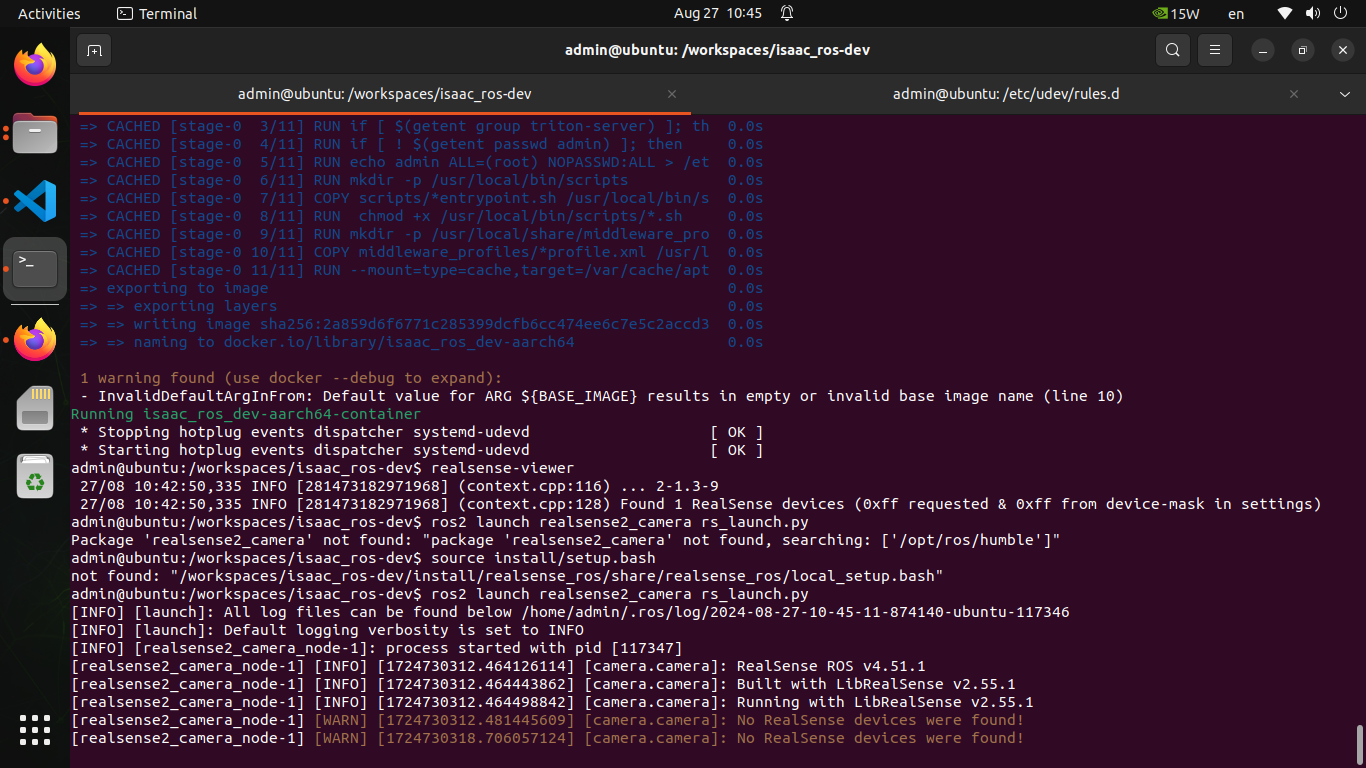
But I run
ros2 launch realsense2_camera rs_launch.py show No RealSense devices were found! help me pls
I tryed again Isaac ROS RealSense Setup — isaac_ros_docs documentation
same result
realsense-viewerros2 launch realsense2_camera rs_launch.py show No RealSense devices were found! help me pls
I tryed again Isaac ROS RealSense Setup — isaac_ros_docs documentation
same result
Hi @AMR_all,
Thank you for your post.
Have you try “$ sudo apt-get update” and reinstall the package to see if it works?
Please let me know if it helps, thanks.
Johnny
thank you very much
12:51:56 [Warn] /root/librealsense/src/libusb/messenger-libusb.cpp:42 - control_transfer returned error, index: 768, error: Resource temporarily unavailable, number: 11
when use IMU this is error and don’t output IMU ,camare .
but if don’t use IMU not error and used camera
This topic was automatically closed 14 days after the last reply. New replies are no longer allowed.