When I launch the image resize and rectify nodes:
/right/image_raw has valid image data

/right/image_resize is published with image all 0s
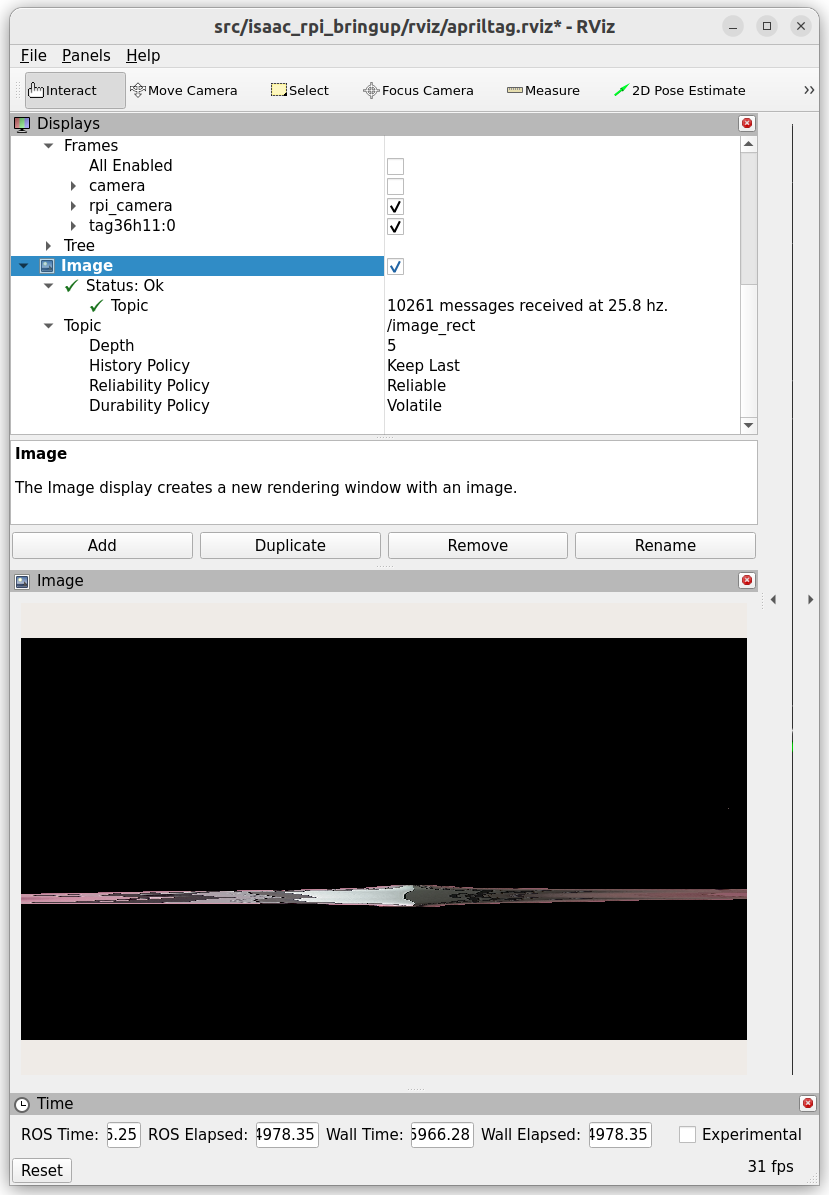
/right/image_rect is published with image all 0s
(if I remove the resize node image rect is still 0s)

I am using a modified version of this launchfile: isaac_ros_dnn_stereo_depth/isaac_ros_ess/launch/isaac_ros_argus_ess.launch.py at main · NVIDIA-ISAAC-ROS/isaac_ros_dnn_stereo_depth · GitHub
import launch
from launch_ros.actions import ComposableNodeContainer
from launch_ros.descriptions import ComposableNode
def generate_launch_description():
output_width = 480
output_height = 288
argus_left_node = ComposableNode(
name='argus_mono_left',
package='isaac_ros_argus_camera',
plugin='nvidia::isaac_ros::argus::ArgusMonoNode',
parameters=[{
'mode': 4,
'camera_id': 1,
'camera_info_url': 'file:///workspaces/isaac_ros-dev/left_camera.ini',
'camera_link_frame_name': 'camera_link',
'optical_frame_name': 'camera_left_link_optical'
}],
remappings=[
('/left/image_raw', '/left/image_raw'),
('/left/camera_info', '/left/camera_info'),
],
)
argus_right_node = ComposableNode(
name='argus_mono_right',
package='isaac_ros_argus_camera',
plugin='nvidia::isaac_ros::argus::ArgusMonoNode',
parameters=[{
'mode': 4,
'camera_id': 0,
'camera_info_url': 'file:///workspaces/isaac_ros-dev/right_camera.ini',
'camera_link_frame_name': 'camera_link',
'optical_frame_name': 'camera_right_link_optical'
}],
remappings=[
('/left/image_raw', '/right/image_raw'),
('/left/camera_info', '/right/camera_info'),
],
)
left_resize_node = ComposableNode(
name='left_resize_node',
package='isaac_ros_image_proc',
plugin='nvidia::isaac_ros::image_proc::ResizeNode',
parameters=[{
'output_width': output_width,
'output_height': output_height,
'keep_aspect_ratio': True
}],
remappings=[
('camera_info', 'left/camera_info'),
('image', 'left/image_raw'),
('resize/camera_info', 'left/camera_info_resize'),
('resize/image', 'left/image_resize')]
)
right_resize_node = ComposableNode(
name='right_resize_node',
package='isaac_ros_image_proc',
plugin='nvidia::isaac_ros::image_proc::ResizeNode',
parameters=[{
'output_width': output_width,
'output_height': output_height,
'keep_aspect_ratio': True
}],
remappings=[
('camera_info', 'right/camera_info'),
('image', 'right/image_raw'),
('resize/camera_info', 'right/camera_info_resize'),
('resize/image', 'right/image_resize')]
)
left_rectify_node = ComposableNode(
name='left_rectify_node',
package='isaac_ros_image_proc',
plugin='nvidia::isaac_ros::image_proc::RectifyNode',
parameters=[{
'output_width': output_width,
'output_height': output_height,
}],
remappings=[
('image_raw', 'left/image_resize'),
('camera_info', 'left/camera_info_resize'),
('image_rect', 'left/image_rect'),
('camera_info_rect', 'left/camera_info_rect')
]
)
right_rectify_node = ComposableNode(
name='right_rectify_node',
package='isaac_ros_image_proc',
plugin='nvidia::isaac_ros::image_proc::RectifyNode',
parameters=[{
'output_width': output_width,
'output_height': output_height,
}],
remappings=[
('image_raw', 'right/image_resize'),
('camera_info', 'right/camera_info_resize'),
('image_rect', 'right/image_rect'),
('camera_info_rect', 'right/camera_info_rect')
]
)
argus_mono_container = ComposableNodeContainer(
name='argus_mono_container',
package='rclcpp_components',
executable='component_container_mt',
composable_node_descriptions=[argus_left_node, argus_right_node, left_resize_node, right_resize_node, left_rectify_node, right_rectify_node],
namespace='',
output='screen',
arguments=['--ros-args', '--log-level', 'info'],
)
return launch.LaunchDescription([argus_mono_container])
What is wrong? I attach execution logs
launch_camera_logs.txt (83.5 KB)