Hello everyone I am trying to run isaac_ros_argus_camera with ros2 launch isaac_ros_argus_camera isaac_ros_argus_camera_stereo.launch.py or mono but I cannot make isaac ros argus to publish my camera data everything looks fine but I guess I am missing something.
I tried to give as much detailed information as I can below error log etc. but if you need more information I can give it. Thank you very much in advance to anyone who can help.
Log/Error Details
Output of the following code is
ros2 launch isaac_ros_argus_camera isaac_ros_argus_camera_stereo.launch.py mode:=0 camera_type:=0 fsync_type:=0 camera_info_url:=~/test_calibration.ini
this =>
[INFO] [launch]: All log files can be found below /home/admin/.ros/log/2024-05-14-08-21-32-941084-ubuntu-8307
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [component_container_mt-1]: process started with pid [8318]
[component_container_mt-1] [INFO] [1715664093.469277043] [argus_stereo_container]: Load Library: /opt/ros/humble/lib/libstereo_node.so
[component_container_mt-1] [INFO] [1715664093.518823338] [argus_stereo_container]: Found class: rclcpp_components::NodeFactoryTemplate<nvidia::isaac_ros::argus::ArgusStereoNode>
[component_container_mt-1] [INFO] [1715664093.518964305] [argus_stereo_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nvidia::isaac_ros::argus::ArgusStereoNode>
[component_container_mt-1] [INFO] [1715664093.525522695] [NitrosContext]: [NitrosContext] Creating a new shared context
[component_container_mt-1] [INFO] [1715664093.525734290] [argus_stereo]: [NitrosNode] Initializing NitrosNode
[component_container_mt-1] [INFO] [1715664093.526159977] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/std/libgxf_std.so
[component_container_mt-1] [INFO] [1715664093.533277820] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/libgxf_gxf_helpers.so
[component_container_mt-1] [INFO] [1715664093.537180679] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/libgxf_sight.so
[component_container_mt-1] [INFO] [1715664093.541332383] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/libgxf_atlas.so
[component_container_mt-1] [INFO] [1715664093.546360422] [NitrosContext]: [NitrosContext] Loading application: '/opt/ros/humble/share/isaac_ros_nitros/config/type_adapter_nitros_context_graph.yaml'
[component_container_mt-1] [INFO] [1715664093.547720556] [NitrosContext]: [NitrosContext] Initializing application...
[component_container_mt-1] [INFO] [1715664093.551880677] [NitrosContext]: [NitrosContext] Running application...
[component_container_mt-1] 2024-05-14 08:21:33.551 WARN gxf/std/program.cpp@514: No system specified. Nothing to do
[component_container_mt-1] [INFO] [1715664093.555337306] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/libgxf_argus.so
[component_container_mt-1] [INFO] [1715664093.692456485] [NitrosContext]: [NitrosContext] Loading application: '/opt/ros/humble/share/isaac_ros_argus_camera/config/argus_nitros_context_graph.yaml'
[component_container_mt-1] [INFO] [1715664093.693007298] [NitrosContext]: [NitrosContext] Initializing application...
[component_container_mt-1] [INFO] [1715664093.694388554] [NitrosContext]: [NitrosContext] Running application...
[component_container_mt-1] 2024-05-14 08:21:33.694 WARN gxf/std/program.cpp@514: No system specified. Nothing to do
[component_container_mt-1] [INFO] [1715664093.694989545] [argus_stereo]: [NitrosNode] Starting NitrosNode
[component_container_mt-1] [INFO] [1715664093.695039340] [argus_stereo]: [NitrosNode] Loading built-in preset extension specs
[component_container_mt-1] [INFO] [1715664093.697663509] [argus_stereo]: [NitrosNode] Loading built-in extension specs
[component_container_mt-1] [INFO] [1715664093.697738745] [argus_stereo]: [NitrosNode] Loading preset extension specs
[component_container_mt-1] [INFO] [1715664093.699066334] [argus_stereo]: [NitrosNode] Loading extension specs
[component_container_mt-1] [INFO] [1715664093.699110944] [argus_stereo]: [NitrosNode] Loading generator rules
[component_container_mt-1] [INFO] [1715664093.699454098] [argus_stereo]: [NitrosNode] Loading extensions
[component_container_mt-1] [INFO] [1715664093.699563480] [argus_stereo]: [NitrosContext] Loading extension: gxf/lib/libgxf_message_compositor.so
[component_container_mt-1] [INFO] [1715664093.701069414] [argus_stereo]: [NitrosContext] Loading extension: gxf/lib/cuda/libgxf_cuda.so
[component_container_mt-1] [INFO] [1715664093.702418989] [argus_stereo]: [NitrosContext] Loading extension: gxf/lib/serialization/libgxf_serialization.so
[component_container_mt-1] [INFO] [1715664093.706818322] [argus_stereo]: [NitrosContext] Loading extension: gxf/lib/libgxf_isaac_messages.so
[component_container_mt-1] [INFO] [1715664093.712770536] [argus_stereo]: [NitrosContext] Loading extension: gxf/lib/multimedia/libgxf_multimedia.so
[component_container_mt-1] [INFO] [1715664093.714108494] [argus_stereo]: [NitrosContext] Loading extension: gxf/lib/image_proc/libgxf_tensorops.so
[component_container_mt-1] [INFO] [1715664093.720885327] [argus_stereo]: [NitrosContext] Loading extension: gxf/lib/image_proc/libgxf_rectify_params_generator.so
[component_container_mt-1] [INFO] [1715664093.727004718] [argus_stereo]: [NitrosContext] Loading extension: gxf/lib/libgxf_timestamp_correlator.so
[component_container_mt-1] [INFO] [1715664093.732272129] [argus_stereo]: [NitrosContext] Loading extension: gxf/lib/utils/libgxf_utils.so
[component_container_mt-1] [INFO] [1715664093.733781424] [argus_stereo]: [NitrosNode] Loading graph to the optimizer
[component_container_mt-1] [INFO] [1715664093.741185649] [argus_stereo]: [NitrosNode] Running optimization
[component_container_mt-1] [INFO] [1715664093.859969217] [argus_stereo]: [NitrosNode] Obtaining graph IO group info from the optimizer
[component_container_mt-1] [INFO] [1715664093.862411905] [argus_stereo]: [NitrosNode] Creating negotiated publishers/subscribers
[component_container_mt-1] [INFO] [1715664093.878285052] [argus_stereo]: [NitrosNode] Starting negotiation...
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/argus_stereo' in container '/argus_stereo_container'
[component_container_mt-1] [INFO] [1715664094.880608201] [argus_stereo]: [NitrosNode] Starting post negotiation setup
[component_container_mt-1] [INFO] [1715664094.880785363] [argus_stereo]: [NitrosNode] Getting data format negotiation results
[component_container_mt-1] [INFO] [1715664094.880982685] [argus_stereo]: [NitrosPublisher] Negotiation ended with no results
[component_container_mt-1] [INFO] [1715664094.881020959] [argus_stereo]: [NitrosPublisher] Use only the compatible publisher: topic_name="/left/image_raw", data_format="nitros_image_rgb8"
[component_container_mt-1] [INFO] [1715664094.881049952] [argus_stereo]: [NitrosPublisher] Negotiation ended with no results
[component_container_mt-1] [INFO] [1715664094.881069313] [argus_stereo]: [NitrosPublisher] Use only the compatible publisher: topic_name="/right/image_raw", data_format="nitros_image_rgb8"
[component_container_mt-1] [INFO] [1715664094.881103715] [argus_stereo]: [NitrosPublisher] Negotiation ended with no results
[component_container_mt-1] [INFO] [1715664094.881123108] [argus_stereo]: [NitrosPublisher] Use only the compatible publisher: topic_name="/left/camerainfo", data_format="nitros_camera_info"
[component_container_mt-1] [INFO] [1715664094.881142117] [argus_stereo]: [NitrosPublisher] Negotiation ended with no results
[component_container_mt-1] [INFO] [1715664094.881159270] [argus_stereo]: [NitrosPublisher] Use only the compatible publisher: topic_name="/right/camerainfo", data_format="nitros_camera_info"
[component_container_mt-1] [INFO] [1715664094.881734244] [argus_stereo]: [NitrosNode] Exporting the final graph based on the negotiation results
[component_container_mt-1] [INFO] [1715664094.911296165] [argus_stereo]: [NitrosNode] Wrote the final top level YAML graph to "/tmp/isaac_ros_nitros/graphs/GMSMTWJIQE/GMSMTWJIQE.yaml"
[component_container_mt-1] [INFO] [1715664094.911448013] [argus_stereo]: [NitrosNode] Calling user's pre-load-graph callback
[component_container_mt-1] [INFO] [1715664094.911477679] [argus_stereo]: [NitrosNode] Loading application
[component_container_mt-1] [INFO] [1715664094.911506864] [argus_stereo]: [NitrosContext] Loading application: '/tmp/isaac_ros_nitros/graphs/GMSMTWJIQE/GMSMTWJIQE.yaml'
[component_container_mt-1] 2024-05-14 08:21:34.921 WARN gxf/std/yaml_file_loader.cpp@1058: Using unregistered parameter 'left_camera_frame' in component ''.
[component_container_mt-1] 2024-05-14 08:21:34.921 WARN gxf/std/yaml_file_loader.cpp@1058: Using unregistered parameter 'right_camera_frame' in component ''.
[component_container_mt-1] 2024-05-14 08:21:34.921 WARN gxf/std/yaml_file_loader.cpp@1058: Using unregistered parameter 'allocator' in component ''.
[component_container_mt-1] [INFO] [1715664094.923115180] [argus_stereo]: [NitrosNode] Linking Nitros pub/sub to the loaded application
[component_container_mt-1] [INFO] [1715664094.923507424] [argus_stereo]: [NitrosNode] Calling user's post-load-graph callback
[component_container_mt-1] [INFO] [1715664094.923547682] [argus_stereo]: [ArgusCameraNode] postLoadGraphCallback().
[component_container_mt-1] [INFO] [1715664094.923633703] [argus_stereo]: [NitrosContext] Initializing application...
[component_container_mt-1] [INFO] [1715664095.212257263] [argus_stereo]: [NitrosContext] Running application...
[component_container_mt-1] [INFO] [1715664095.212854190] [argus_stereo]: [NitrosNode] Starting a heartbeat timer (eid=93)
[component_container_mt-1] 2024-05-14 08:21:35.316 ERROR extensions/hawk/components/argus_camera.cpp@262: No synchronized stereo camera modules found, but camera type was specified as stereo
[component_container_mt-1] 2024-05-14 08:21:35.316 WARN gxf/std/multi_thread_scheduler.cpp@325: Error while executing entity E32 named 'GMSMTWJIQE_argus_camera': GXF_FAILURE
[component_container_mt-1] 2024-05-14 08:21:35.317 ERROR gxf/std/entity_executor.cpp@563: Entity [GMSMTWJIQE_argus_camera] must be in Started, Tick Pending, Ticking or Idle stage before stopping. Current state is StartPending
[component_container_mt-1] 2024-05-14 08:21:36.213 ERROR gxf/std/entity_executor.cpp@210: Entity with eid 93 not found!
[component_container_mt-1] [WARN] [1715664096.213482046] [argus_stereo]: [NitrosNode] The heartbeat entity (eid=93) was stopped. The graph may have been terminated.
[component_container_mt-1] [INFO] [1715664096.219673919] [argus_stereo]: [NitrosNode] Terminating the running application
[component_container_mt-1] [INFO] [1715664096.219747555] [argus_stereo]: [NitrosContext] Interrupting GXF...
[component_container_mt-1] 2024-05-14 08:21:36.219 ERROR gxf/core/runtime.cpp@1400: Graph interrupt failed with error: GXF_FAILURE
[component_container_mt-1] [ERROR] [1715664096.219927372] [argus_stereo]: [NitrosContext] GxfGraphInterrupt Error: GXF_FAILURE
[component_container_mt-1] [INFO] [1715664096.219942317] [argus_stereo]: [NitrosContext] Waiting on GXF...
[component_container_mt-1] 2024-05-14 08:21:36.219 ERROR gxf/std/program.cpp@556: wait failed. Deactivating...
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] | Job Statistics Report (regular) |
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] | Name | Count | Time (Median - 90% - Max) [ms] | Load (%) | Exec(ms) | Variation (Median - 90% - Max) [ns] |
[component_container_mt-1] |------------------------------------------------------------------------------------------------------------------------------------------------------------------|
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] | Entity Statistics Report (regular) |
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] | Entity Name | Entity State | Count | Time (Median - 90% - Max) [ms] |
[component_container_mt-1] |------------------------------------------------------------------------------------------------------------------------------------------------------------------|
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] 2024-05-14 08:21:36.243 WARN gxf/std/entity_warden.cpp@433: Component of type nvidia::gxf::MultiThreadScheduler, cid 124 failed to deinitialize with code GXF_FAILURE
[component_container_mt-1] 2024-05-14 08:21:36.243 ERROR gxf/core/runtime.cpp@731: Could not deinitialize entity 'GMSMTWJIQE_ILWNZVEKZH' (E122): GXF_FAILURE
[component_container_mt-1] 2024-05-14 08:21:36.243 ERROR gxf/std/program.cpp@558: Deactivation failed.
[component_container_mt-1] 2024-05-14 08:21:36.243 ERROR gxf/core/runtime.cpp@1408: Graph wait failed with error: GXF_FAILURE
[component_container_mt-1] [ERROR] [1715664096.243765694] [argus_stereo]: [NitrosContext] GxfGraphWait Error: GXF_FAILURE
[component_container_mt-1] [INFO] [1715664096.243798015] [argus_stereo]: [NitrosNode] Application termination done
[INFO] [component_container_mt-1]: process has finished cleanly [pid 8318]
L4T: 35.4.1
Jetpack 5.1.2
NVIDIA Jetson Orin NX (8GB ram)
isaac-ros-argus-camera environment => I am using Docker image
Hi @yavuz.ertugrul
welcome to the forum!
Have you checked if the camera drivers are updated for Jetpack 5.1.2?
Best,
Raffaello
Thank you for your warm welcome @Raffaello ,
I am using this camera driver in github ArduCAM/MIPI_Camera/releases
jetson-stats output =>
This is output of custom node that I wrote my for my camera to publish camera data
Custom node code
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
import cv2
class V4L2CameraNode(Node):
def __init__(self):
super().__init__('v4l2_camera_node')
self.publisher = self.create_publisher(Image, '/image_raw', 10)
self.bridge = CvBridge()
self.cap = cv2.VideoCapture('/dev/video0', cv2.CAP_V4L2)
self.cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640)
self.cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)
self.cap.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc(*'Y16 '))
self.cap.set(cv2.CAP_PROP_FPS, 30) # Set the desired frame rate
self.timer = self.create_timer(0.033, self.timer_callback) # 30 FPS = 1/30 seconds per frame
def timer_callback(self):
ret, frame = self.cap.read()
if ret:
self.get_logger().info(f'Captured frame shape: {frame.shape}, dtype: {frame.dtype}')
# Since the frame is already in a 3-channel format, directly convert it to a ROS Image message
try:
ros_image = self.bridge.cv2_to_imgmsg(frame, encoding='bgr8') # Assuming the frame is in BGR format
self.publisher.publish(ros_image)
except CvBridgeError as e:
self.get_logger().error(f'Failed to convert frame to ROS Image message: {e}')
else:
self.get_logger().error('Failed to capture image')
def main(args=None):
rclpy.init(args=args)
v4l2_camera_node = V4L2CameraNode()
rclpy.spin(v4l2_camera_node)
v4l2_camera_node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
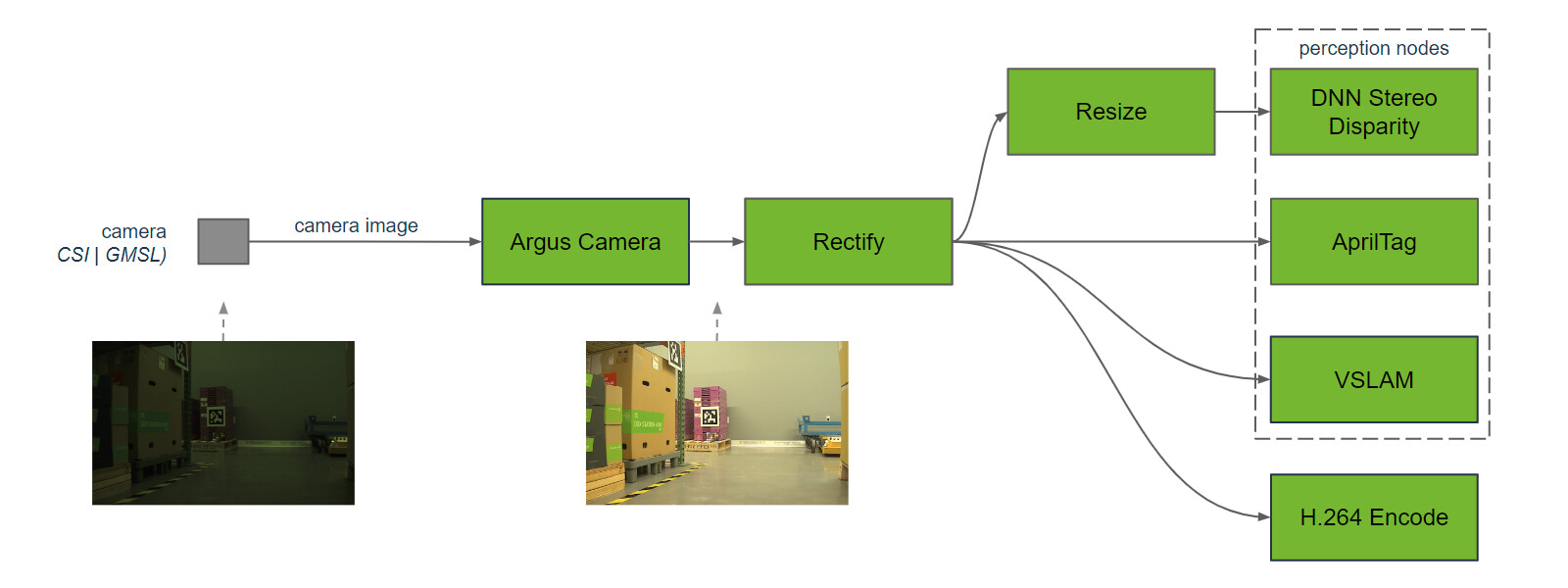
With custom node I can publish my camera data and as far as I understand from below
Argus camera uses what I published to for example
/image_raw however as you check previously I cannot, everything looks fine but I don’t know what is the problem
I also checked Libargus Camera API => Jetson Linux API Reference: Libargus Camera API | NVIDIA Docs
and I saw this part maybe can this be the problem

and again this is the product => Arducam 2.3MP AR0234 Global Shutter Camera for Nvidia Jetson Nano/NX
Thank you for your help, thanks in advance.
Hi @yavuz.ertugrul
Looking at your log, the arguscamera is failing because it doesn’t detect a stereo camera
Can you please share the output from Argus Camera Mono?
ros2 launch isaac_ros_argus_camera isaac_ros_argus_camera_mono.launch.py
Best,
Raffaello
Hi @Raffaello ,
When I tried mono launch
ros2 launch isaac_ros_argus_camera isaac_ros_argus_camera_mono.launch.py
Output of Argus Camera Mono
[INFO] [launch]: All log files can be found below /home/admin/.ros/log/2024-05-23-11-12-37-505964-ubuntu-14103
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [component_container_mt-1]: process started with pid [14114]
[component_container_mt-1] [INFO] [1716451958.101890844] [argus_mono_container]: Load Library: /workspaces/isaac_ros-dev/install/isaac_ros_argus_camera/lib/libmono_node.so
[component_container_mt-1] [INFO] [1716451958.173840852] [argus_mono_container]: Found class: rclcpp_components::NodeFactoryTemplate<nvidia::isaac_ros::argus::ArgusMonoNode>
[component_container_mt-1] [INFO] [1716451958.175010719] [argus_mono_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nvidia::isaac_ros::argus::ArgusMonoNode>
[component_container_mt-1] [INFO] [1716451958.196413161] [NitrosContext]: [NitrosContext] Creating a new shared context
[component_container_mt-1] [INFO] [1716451958.199754882] [argus_mono]: [NitrosNode] Initializing NitrosNode
[component_container_mt-1] [INFO] [1716451958.201379486] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/std/libgxf_std.so
[component_container_mt-1] [INFO] [1716451958.221381941] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/libgxf_gxf_helpers.so
[component_container_mt-1] [INFO] [1716451958.233503054] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/libgxf_sight.so
[component_container_mt-1] [INFO] [1716451958.244146321] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/libgxf_atlas.so
[component_container_mt-1] [INFO] [1716451958.250697023] [NitrosContext]: [NitrosContext] Loading application: '/opt/ros/humble/share/isaac_ros_nitros/config/type_adapter_nitros_context_graph.yaml'
[component_container_mt-1] [INFO] [1716451958.252901231] [NitrosContext]: [NitrosContext] Initializing application...
[component_container_mt-1] [INFO] [1716451958.257558168] [NitrosContext]: [NitrosContext] Running application...
[component_container_mt-1] 2024-05-23 11:12:38.258 WARN gxf/std/program.cpp@514: No system specified. Nothing to do
[component_container_mt-1] [INFO] [1716451958.264338319] [NitrosContext]: [NitrosContext] Loading extension: gxf/lib/libgxf_argus.so
[component_container_mt-1] [INFO] [1716451958.483209125] [NitrosContext]: [NitrosContext] Loading application: '/workspaces/isaac_ros-dev/install/isaac_ros_argus_camera/share/isaac_ros_argus_camera/config/argus_nitros_context_graph.yaml'
[component_container_mt-1] [INFO] [1716451958.484836416] [NitrosContext]: [NitrosContext] Initializing application...
[component_container_mt-1] [INFO] [1716451958.486779495] [NitrosContext]: [NitrosContext] Running application...
[component_container_mt-1] 2024-05-23 11:12:38.487 WARN gxf/std/program.cpp@514: No system specified. Nothing to do
[component_container_mt-1] [INFO] [1716451958.488530791] [argus_mono]: [NitrosNode] Starting NitrosNode
[component_container_mt-1] [INFO] [1716451958.489062170] [argus_mono]: [NitrosNode] Loading built-in preset extension specs
[component_container_mt-1] [INFO] [1716451958.492816259] [argus_mono]: [NitrosNode] Loading built-in extension specs
[component_container_mt-1] [INFO] [1716451958.493365527] [argus_mono]: [NitrosNode] Loading preset extension specs
[component_container_mt-1] [INFO] [1716451958.495029459] [argus_mono]: [NitrosNode] Loading extension specs
[component_container_mt-1] [INFO] [1716451958.495562214] [argus_mono]: [NitrosNode] Loading generator rules
[component_container_mt-1] [INFO] [1716451958.496556971] [argus_mono]: [NitrosNode] Loading extensions
[component_container_mt-1] [INFO] [1716451958.497322598] [argus_mono]: [NitrosContext] Loading extension: gxf/lib/libgxf_message_compositor.so
[component_container_mt-1] [INFO] [1716451958.499674172] [argus_mono]: [NitrosContext] Loading extension: gxf/lib/cuda/libgxf_cuda.so
[component_container_mt-1] [INFO] [1716451958.501730343] [argus_mono]: [NitrosContext] Loading extension: gxf/lib/serialization/libgxf_serialization.so
[component_container_mt-1] [INFO] [1716451958.507556218] [argus_mono]: [NitrosContext] Loading extension: gxf/lib/libgxf_isaac_messages.so
[component_container_mt-1] [INFO] [1716451958.514798050] [argus_mono]: [NitrosContext] Loading extension: gxf/lib/multimedia/libgxf_multimedia.so
[component_container_mt-1] [INFO] [1716451958.517253979] [argus_mono]: [NitrosContext] Loading extension: gxf/lib/image_proc/libgxf_tensorops.so
[component_container_mt-1] [INFO] [1716451958.525818867] [argus_mono]: [NitrosContext] Loading extension: gxf/lib/image_proc/libgxf_rectify_params_generator.so
[component_container_mt-1] [INFO] [1716451958.533714802] [argus_mono]: [NitrosContext] Loading extension: gxf/lib/libgxf_timestamp_correlator.so
[component_container_mt-1] [INFO] [1716451958.540552522] [argus_mono]: [NitrosNode] Loading graph to the optimizer
[component_container_mt-1] [INFO] [1716451958.545687845] [argus_mono]: [NitrosNode] Running optimization
[component_container_mt-1] [INFO] [1716451958.567949326] [argus_mono]: [NitrosNode] Obtaining graph IO group info from the optimizer
[component_container_mt-1] [INFO] [1716451958.570388071] [argus_mono]: [NitrosNode] Creating negotiated publishers/subscribers
[component_container_mt-1] [INFO] [1716451958.584819732] [argus_mono]: [NitrosNode] Starting negotiation...
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/argus_mono' in container '/argus_mono_container'
[component_container_mt-1] [INFO] [1716451959.589731632] [argus_mono]: [NitrosNode] Starting post negotiation setup
[component_container_mt-1] [INFO] [1716451959.589902582] [argus_mono]: [NitrosNode] Getting data format negotiation results
[component_container_mt-1] [INFO] [1716451959.589955608] [argus_mono]: [NitrosPublisher] Negotiation ended with no results
[component_container_mt-1] [INFO] [1716451959.590101790] [argus_mono]: [NitrosPublisher] Use only the compatible publisher: topic_name="/left/image_raw", data_format="nitros_image_rgb8"
[component_container_mt-1] [INFO] [1716451959.590144319] [argus_mono]: [NitrosPublisher] Negotiation ended with no results
[component_container_mt-1] [INFO] [1716451959.590166528] [argus_mono]: [NitrosPublisher] Use only the compatible publisher: topic_name="/left/camerainfo", data_format="nitros_camera_info"
[component_container_mt-1] [INFO] [1716451959.590681523] [argus_mono]: [NitrosNode] Exporting the final graph based on the negotiation results
[component_container_mt-1] [INFO] [1716451959.606630199] [argus_mono]: [NitrosNode] Wrote the final top level YAML graph to "/tmp/isaac_ros_nitros/graphs/NIGCRGROHD/NIGCRGROHD.yaml"
[component_container_mt-1] [INFO] [1716451959.606752155] [argus_mono]: [NitrosNode] Calling user's pre-load-graph callback
[component_container_mt-1] [INFO] [1716451959.606787868] [argus_mono]: [NitrosNode] Loading application
[component_container_mt-1] [INFO] [1716451959.606816446] [argus_mono]: [NitrosContext] Loading application: '/tmp/isaac_ros_nitros/graphs/NIGCRGROHD/NIGCRGROHD.yaml'
[component_container_mt-1] 2024-05-23 11:12:39.615 WARN gxf/std/yaml_file_loader.cpp@1058: Using unregistered parameter 'left_camera_frame' in component ''.
[component_container_mt-1] 2024-05-23 11:12:39.615 WARN gxf/std/yaml_file_loader.cpp@1058: Using unregistered parameter 'right_camera_frame' in component ''.
[component_container_mt-1] [INFO] [1716451959.617396702] [argus_mono]: [NitrosNode] Linking Nitros pub/sub to the loaded application
[component_container_mt-1] [INFO] [1716451959.617742763] [argus_mono]: [NitrosNode] Calling user's post-load-graph callback
[component_container_mt-1] [INFO] [1716451959.617793101] [argus_mono]: [ArgusCameraNode] postLoadGraphCallback().
[component_container_mt-1] [INFO] [1716451959.617899953] [argus_mono]: [NitrosContext] Initializing application...
[component_container_mt-1] [INFO] [1716451959.958467792] [argus_mono]: [NitrosContext] Running application...
[component_container_mt-1] [INFO] [1716451959.959220524] [argus_mono]: [NitrosNode] Starting a heartbeat timer (eid=55)
[component_container_mt-1] 2024-05-23 11:12:40.054 ERROR extensions/hawk/components/argus_camera.cpp@283: No cameras available
[component_container_mt-1] 2024-05-23 11:12:40.055 WARN gxf/std/multi_thread_scheduler.cpp@325: Error while executing entity E32 named 'NIGCRGROHD_argus_camera': GXF_FAILURE
[component_container_mt-1] 2024-05-23 11:12:40.056 ERROR gxf/std/entity_executor.cpp@563: Entity [NIGCRGROHD_argus_camera] must be in Started, Tick Pending, Ticking or Idle stage before stopping. Current state is StartPending
[component_container_mt-1] 2024-05-23 11:12:40.959 ERROR gxf/std/entity_executor.cpp@210: Entity with eid 55 not found!
[component_container_mt-1] [WARN] [1716451960.959748938] [argus_mono]: [NitrosNode] The heartbeat entity (eid=55) was stopped. The graph may have been terminated.
[component_container_mt-1] [INFO] [1716451960.966206100] [argus_mono]: [NitrosNode] Terminating the running application
[component_container_mt-1] [INFO] [1716451960.966267639] [argus_mono]: [NitrosContext] Interrupting GXF...
[component_container_mt-1] 2024-05-23 11:12:40.966 ERROR gxf/core/runtime.cpp@1400: Graph interrupt failed with error: GXF_FAILURE
[component_container_mt-1] [ERROR] [1716451960.966423004] [argus_mono]: [NitrosContext] GxfGraphInterrupt Error: GXF_FAILURE
[component_container_mt-1] [INFO] [1716451960.966436573] [argus_mono]: [NitrosContext] Waiting on GXF...
[component_container_mt-1] 2024-05-23 11:12:40.966 ERROR gxf/std/program.cpp@556: wait failed. Deactivating...
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] | Job Statistics Report (regular) |
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] | Name | Count | Time (Median - 90% - Max) [ms] | Load (%) | Exec(ms) | Variation (Median - 90% - Max) [ns] |
[component_container_mt-1] |------------------------------------------------------------------------------------------------------------------------------------------------------------------|
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] | Entity Statistics Report (regular) |
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] | Entity Name | Entity State | Count | Time (Median - 90% - Max) [ms] |
[component_container_mt-1] |------------------------------------------------------------------------------------------------------------------------------------------------------------------|
[component_container_mt-1] |==================================================================================================================================================================|
[component_container_mt-1] 2024-05-23 11:12:40.968 WARN gxf/std/entity_warden.cpp@433: Component of type nvidia::gxf::MultiThreadScheduler, cid 70 failed to deinitialize with code GXF_FAILURE
[component_container_mt-1] 2024-05-23 11:12:40.968 ERROR gxf/core/runtime.cpp@731: Could not deinitialize entity 'NIGCRGROHD_IITFUSCDPT' (E68): GXF_FAILURE
[component_container_mt-1] 2024-05-23 11:12:40.968 ERROR gxf/std/program.cpp@558: Deactivation failed.
[component_container_mt-1] 2024-05-23 11:12:40.968 ERROR gxf/core/runtime.cpp@1408: Graph wait failed with error: GXF_FAILURE
[component_container_mt-1] [ERROR] [1716451960.968897846] [argus_mono]: [NitrosContext] GxfGraphWait Error: GXF_FAILURE
[component_container_mt-1] [INFO] [1716451960.968916087] [argus_mono]: [NitrosNode] Application termination done
[INFO] [component_container_mt-1]: process has finished cleanly [pid 14114]
Thanks in advance,
Yavuz
Thank you @yavuz.ertugrul. I appreciate it!
I think for the monocular camera everything starts from this error
meanwhile, I forward your issue to the engineering, have you tried to restart the service following our troubleshooting
Thank you for your help and fast response @Raffaello , appreciated a lot.
I also think about that too it directly goes there inside hawk, but I don’t have hawk
- Yes I already tried to restart
nvargus daemon however nothing from there too.
I hope it will be solved, I want to use the power of my jetson orin nx and the isaac ros argus camera
Thanks in advance, I wish you all the best with your work,
Yavuz
1 Like
Hi @Raffaello ,
I’m writing because I want to keep you up to date, and maybe we can find solution to my problem from here.
I tried arducam IMX477 PTZ camera and I installed its driver and tried to launch mono camera and it is working
ros2 launch isaac_ros_argus_camera isaac_ros_argus_camera_mono.launch.py
Note: the blur is because of focus problem I solved that later
Output of v4l2-ctl --list-formats-ext --device /dev/video0
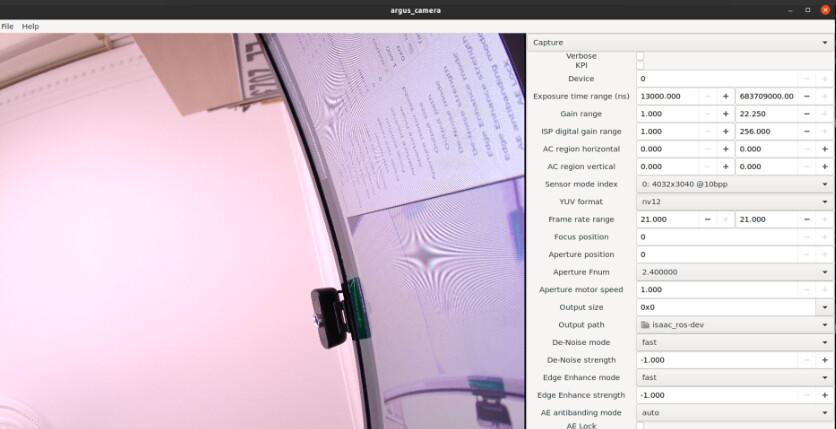
Output of argus_camera
It looks like argus camera is working fine with arducam IMX477 PTZ => https://www.arducam.com/product/arducam-imx477-12mp-ptz-camera-for-raspberry-pi-4-3b-3-and-jetson-nano-xavier-nx-ir-cut-switchable-camera-with-metal-base-and-2-digital-servos/ this is the camera link.
However it is not working with arducam ar0234, maybe these information that I provide may give us a different perspective
Thanks in advance,
Yavuz
Hi @yavuz.ertugrul
Thank you for all this precious information. I will forward this topic to engineering and figure out why the arducam ar0234 doesn’t work.
I will get back to you as soon as possible. We are working on a new release of Isaac ROS, so you can expect some delays in my reply.
1 Like
Hi @Raffaello ,
I hope this message finds you well, is there any update?
Best Regards,
Yavuz
Hi @yavuz.ertugrul
The engineers are still investigating.
Meanwhile, have you tried the new Isaac argus camera in Isaac ROS 3.0?
We made significant updates and now works on Jetpack 6
Best,
Raffaello
Hi @Raffaello ,
I hope this message finds you well, it has been some time since we last talked.
I tried Isaac ROS 3.0 and Jetpack 6 on both arducam imx477 & arducam ar0234 with isaac ros argus camera package,
- imx477 is working like previously but
- ar0234 is still not working it has problem.
Have the engineers found anything about this problem or the cause of the problem?
Best,
Yavuz
Hi @yavuz.ertugrul
Thank you for your post, I just checked, and there are no updates from the engineers, but they are still working.
I keep you posted when there are updates.
Raffaello
Hi @yavuz.ertugrul
Sorry for my late back message.
Have you tried the Arducam ar0234 works without isaac ros ? Like running the sample jetson Multimedia applications?
It looks like an issue with the Arducam driver rather than the Isaac camera ros package. Let me know.
Raffaello