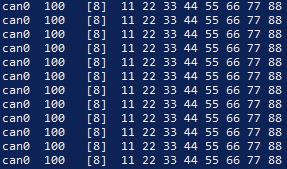
I am currently working on project where it requires CAN from the Jetson Nano Orin. While I was successful getting it up and running, and I can only read data coming from the Tiva TM4C123GH6PM, which is sending data. The CAN_TX does not appear to be working as when I do “cansend can0 100#DEADBEEF”, I do not see that data on my on another micro-controller acting as a reader.
The picture is the Jetson reading the data, this is the correct ID and data from the Tiva TM4C123GH6PM.
I went ahead and checked the the pin for the CAN_TX by using an oscilloscope, and I do not see the data being transmitted what so ever, as shown in the picture above.
For context on the Hardware I am using the following:
- CAN Transceiver: MCP2551 running on 5V
- Microcontroller: Tiva EKG-TMC123 Development Board
The only modification I made was soldering pins so that I can attach jumper cables to it, but otherwise I am clueless as to why it is not working…
Hi,
On Jetson platforms, we support using peripherals like CAN, SPI, I2C, UART… etc. for the user.
For CAN usage:
For the connection of peripheral on the devkit, please refer to expansion-headers guide and carrier board specification:
For pin configuration, please refer to pinmux spreadsheet:
https://developer.nvidia.com/embedded/secure/jetson/agx_orin/jetson_agx_orin_pinmux_config_template.xlsm
By default, the configuration is used for the devkit. If you are using the custom carrier board, please configure it according to your custom board design.
There are also several examples which have been verified from us, please check
Please share the full dmesg and device tree for us to check your status in detail.
Thanks!
There is no update from you for a period, assuming this is not an issue anymore.
Hence, we are closing this topic. If need further support, please open a new one.
Thanks ~0409
Hi c.a.mendoza4508,
Are you using AGX Orin or Orin Nano?
(your topic is in AGX Orin category but you mention Orin Nano here)
Please check CAN-H/CAN-L instead.
Could you share the block diagram of your connections for further check?
You can also provide the steps how do you configure and setup CAN interface.