Dear Community and Nvidia Developer, would greatly appreciate your help and advise!!
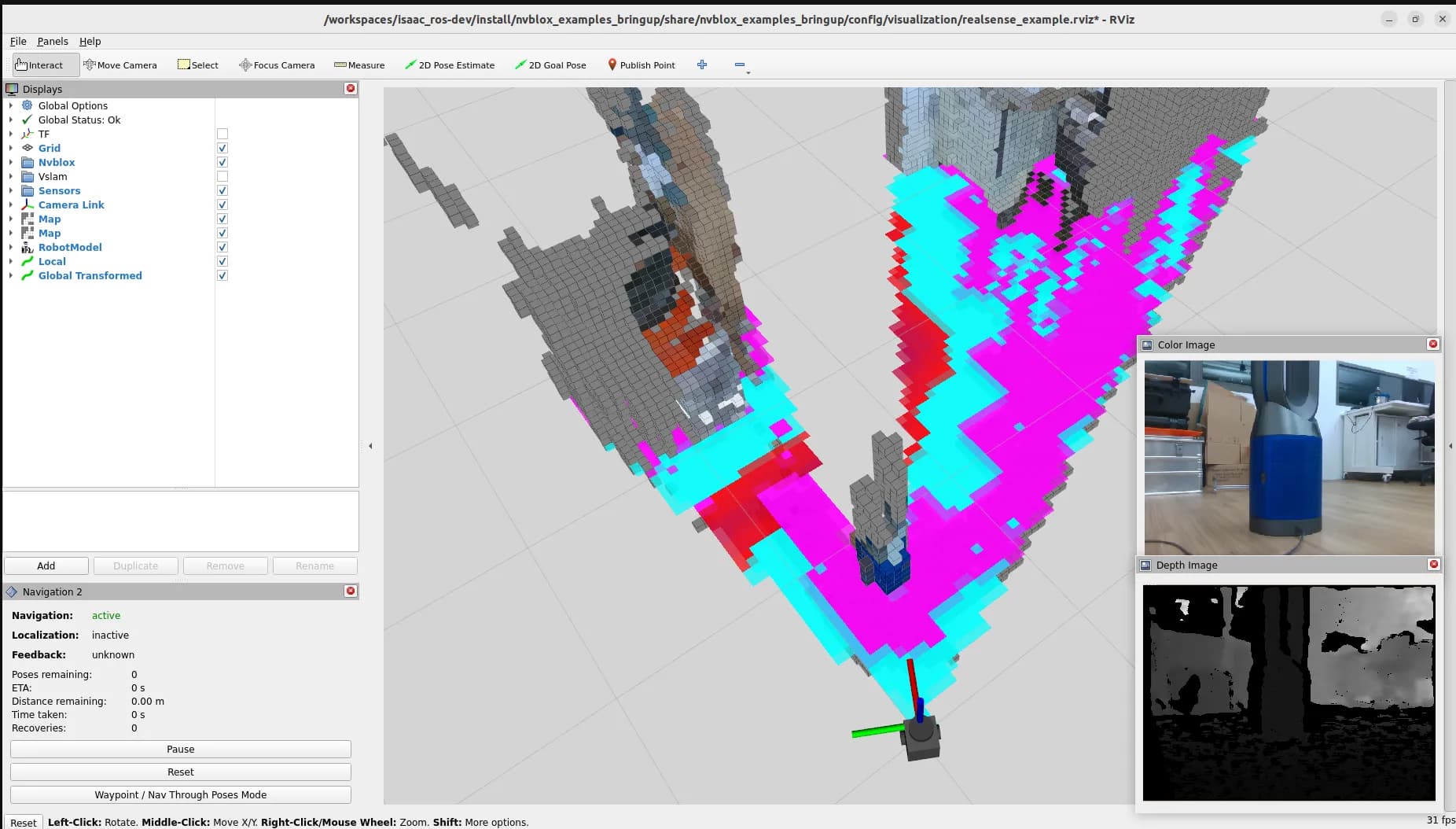
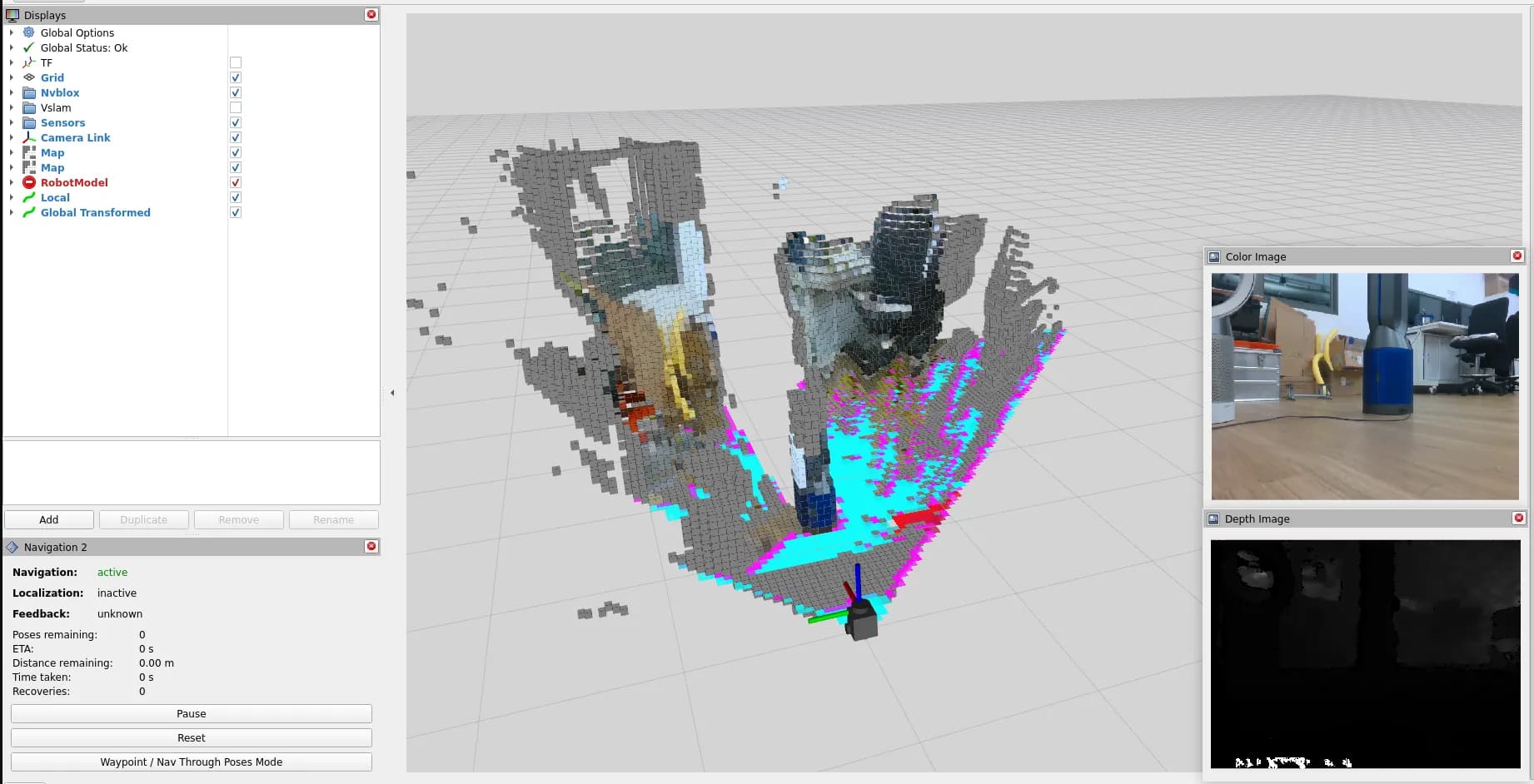
I’m currently facing accuracy issues with the global costmap (visualized in red, blue, and pink) generated by the NVBlox stack in the Isaac ROS pipeline. As shown in the attached image, the costmap does not correctly reflect the actual environment. Even when the floor is completely clear of obstacles, the global costmap continues to indicate false positives.
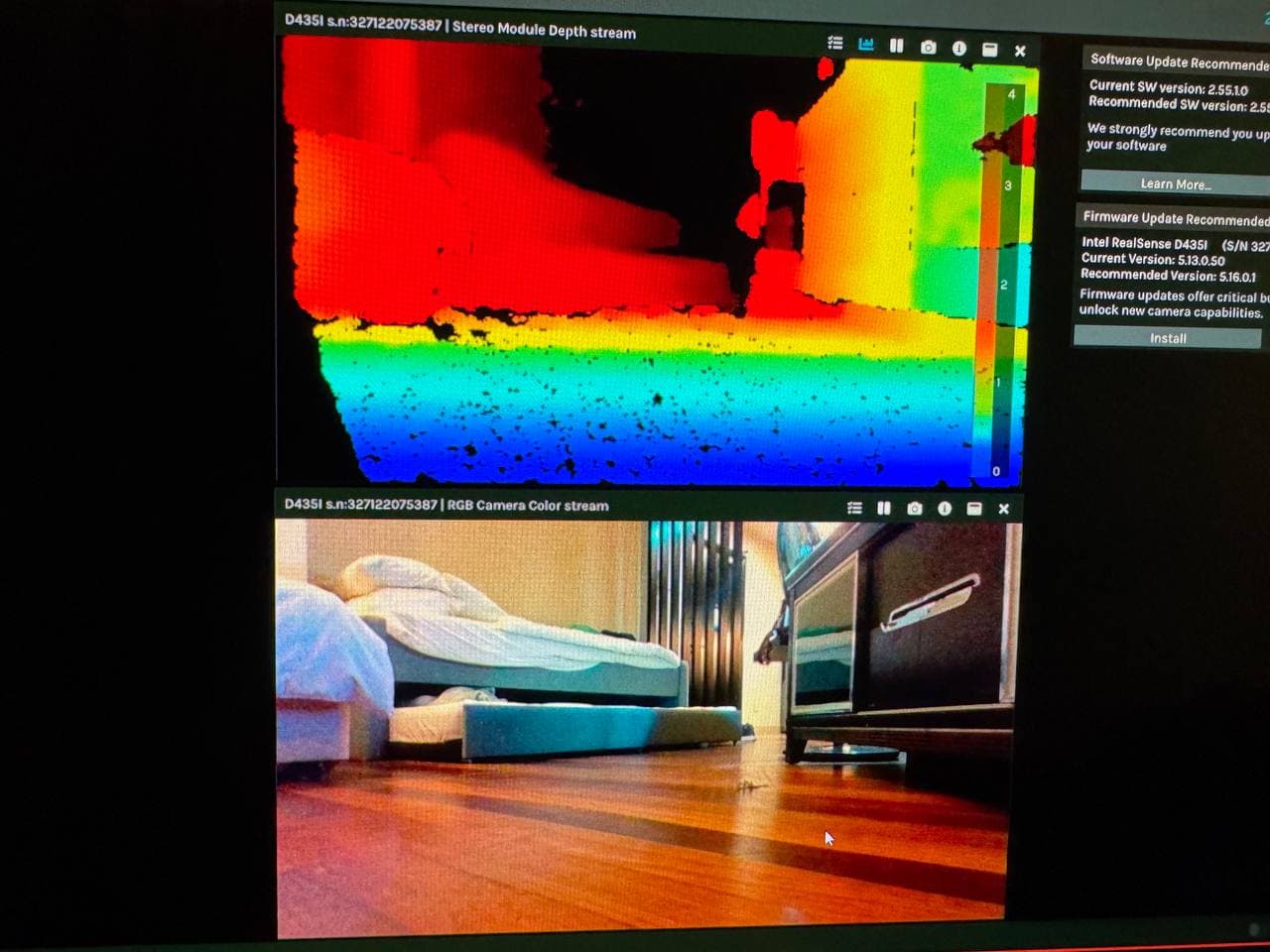
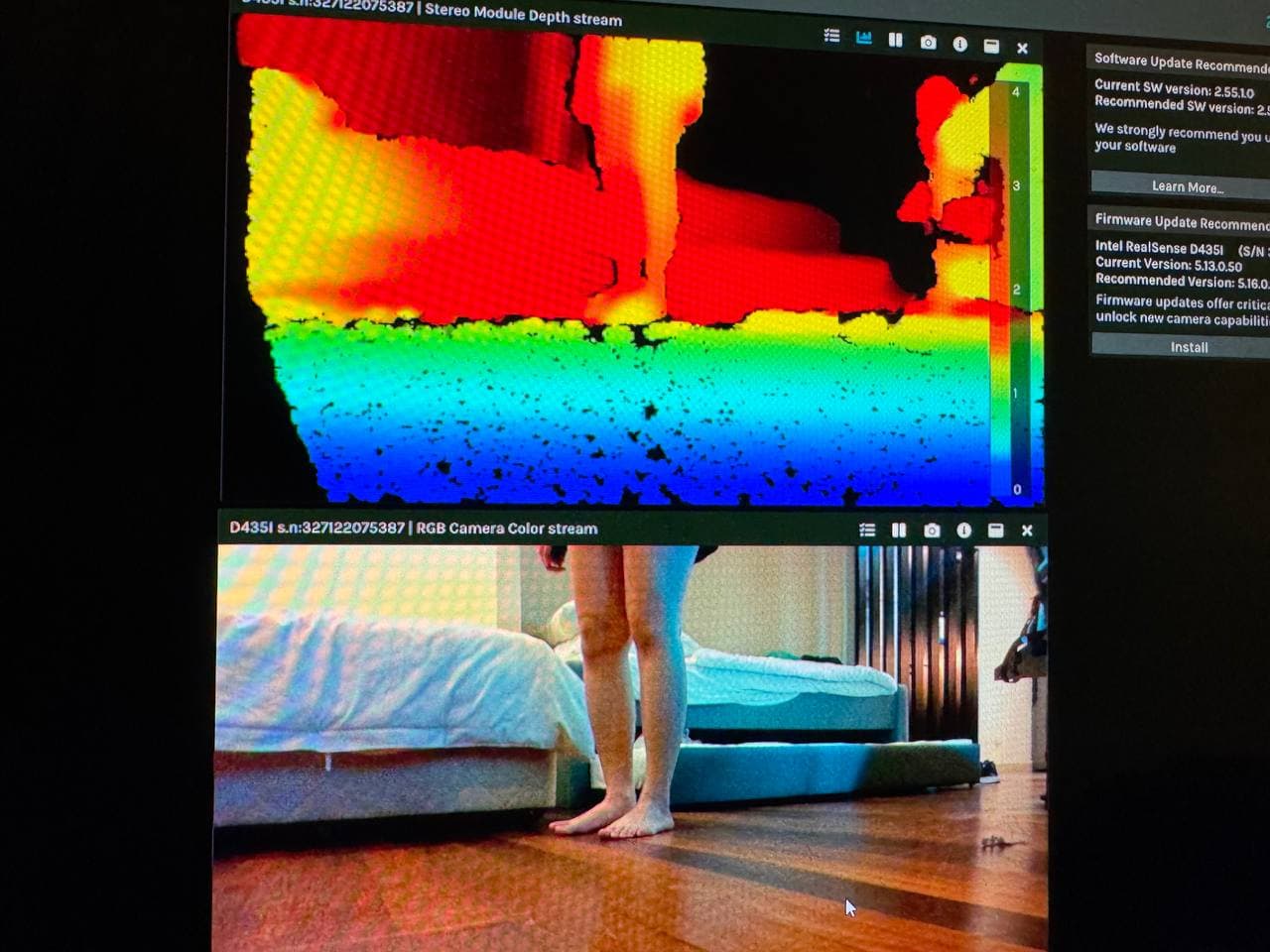
I suspect the issue might be due to unreliable depth sensing from the Intel RealSense D435i. Despite tuning efforts, the depth data still appears inaccurate. The RealSense is currently running firmware version 5.13.0.50. If anyone has recommendations for improving depth reliability or costmap fidelity in this configuration, I’d appreciate any suggestions.

Hardware Setup:
- Robot: TurtleBot3 Burger
- Compute: Jetson Orin NX 16GB
- Depth Camera: Intel RealSense D435i (Firmware: 5.13.0.50)
NVblox + Nav2 Integration:
To integrate NVBlox with Nav2, I’ve included the following three configuration files:
nav2_realsense.yaml
Located at:
src/isaac_ros_nvblox/nvblox_examples/nvblox_examples_bringup/config/nav2/nav2_realsense.yaml
This defines behavior tree configuration, controller/planner settings, velocity smoothing, local/global costmap plugins usingnvblox::nav2::NvbloxCostmapLayer, and parameters for thebt_navigator,controller_server, and other Nav2 nodes.nav2_realsense.launch.py
Located at:
src/isaac_ros_nvblox/nvblox_examples/nvblox_examples_bringup/launch/nav2/nav2_realsense.launch.py
This launch file brings up the main Nav2 nodes using the above YAML configuration.realsense_nav2_example.launch.py
Located at:
src/isaac_ros_nvblox/nvblox_examples/nvblox_examples_bringup/launch/realsense_nav2_example.launch.py
This is the top-level launch file that initializes the static transform frombase_linktocamera0_link, brings up the RealSense camera driver, VSLAM, NVBlox mapping, Nav2 stack, and RViz (optionally).
Questions / Clarification:
- Are there any recommended filters or preprocessing steps for RealSense depth data to improve mapping accuracy with NVBlox? Or this is some other issue?
- Is the use of
odomas the global frame advisable in this configuration, or should I switch tomap? - Do I need to fine-tune the
max_obstacle_distance,inflation_distance, or camera mounting TF more precisely?
The 3 files:
- src/isaac_ros_nvblox/nvblox_examples/nvblox_examples_bringup/config/nav2/nav2_realsense.yaml
%YAML 1.2
---
bt_navigator:
ros__parameters:
use_sim_time: False
global_frame: odom
robot_base_frame: base_link
odom_topic: /odom
bt_loop_duration: 20
default_server_timeout: 40
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_smooth_path_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_back_up_action_bt_node
- nav2_drive_on_heading_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_globally_updated_goal_condition_bt_node
- nav2_is_path_valid_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_truncate_path_local_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_path_expiring_timer_condition
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
- nav2_controller_cancel_bt_node
- nav2_path_longer_on_approach_bt_node
- nav2_wait_cancel_bt_node
- nav2_spin_cancel_bt_node
- nav2_back_up_cancel_bt_node
- nav2_drive_on_heading_cancel_bt_node
bt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: False
controller_server:
ros__parameters:
use_sim_time: False
controller_frequency: 10.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.3
progress_checker_plugin: "progress_checker"
goal_checker_plugin: ["general_goal_checker"]
controller_plugins: ["FollowPath"]
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5
movement_time_allowance: 10.0
# Goal checker parameters
general_goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 3.14
stateful: True
# DWB parameters
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 2.0
max_vel_y: 0.0
max_vel_theta: 1.0
min_speed_xy: 0.0
max_speed_xy: 2.0
min_speed_theta: 0.0
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
acc_lim_x: 1.0
acc_lim_y: 0.0
acc_lim_theta: 1.0
decel_lim_x: -1.0
decel_lim_y: 0.0
decel_lim_theta: -1.0
vx_samples: 30
vy_samples: 10
vtheta_samples: 20
sim_time: 1.4
linear_granularity: 0.05
angular_granularity: 0.025
transform_tolerance: 0.2
xy_goal_tolerance: 0.25
trans_stopped_velocity: 0.25
short_circuit_trajectory_evaluation: True
stateful: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"]
BaseObstacle.scale: 0.02
PathAlign.scale: 32.0
PathAlign.forward_point_distance: 0.1
GoalAlign.scale: 24.0
GoalAlign.forward_point_distance: 0.1
PathDist.scale: 32.0
GoalDist.scale: 24.0
RotateToGoal.scale: 32.0
RotateToGoal.slowing_factor: 1.0
RotateToGoal.lookahead_time: -1.0
# Update velocity smoother default params to match our controller server config
# https://navigation.ros.org/configuration/packages/configuring-velocity-smoother.html
velocity_smoother:
ros__parameters:
smoothing_frequency: 20.0
scale_velocities: false
feedback: "OPEN_LOOP"
max_velocity: [1.0, 0.0, 2.0]
min_velocity: [0.0, 0.0, -2.0]
deadband_velocity: [0.0, 0.0, 0.0]
velocity_timeout: 1.0
max_accel: [1.0, 0.0, 2.0]
max_decel: [-1.0, 0.0, -2.0]
odom_topic: "odom"
odom_duration: 0.1
controller_server_rclcpp_node:
ros__parameters:
use_sim_time: False
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 10.0
publish_frequency: 10.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: False
rolling_window: True
width: 10
height: 10
resolution: 0.05
robot_radius: 0.1
plugins: ["nvblox_base_layer", "nvblox_human_layer"]
nvblox_base_layer:
plugin: "nvblox::nav2::NvbloxCostmapLayer"
enabled: True
max_obstacle_distance: 1.0
inflation_distance: 0.4
nvblox_map_slice_topic: "/nvblox_node/static_map_slice"
nvblox_human_layer:
plugin: "nvblox::nav2::NvbloxCostmapLayer"
enabled: True
max_obstacle_distance: 1.0
inflation_distance: 0.4
nvblox_map_slice_topic: "/nvblox_human_node/human_map_slice"
always_send_full_costmap: True
local_costmap_client:
ros__parameters:
use_sim_time: False
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: False
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 10.0
publish_frequency: 10.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: False
rolling_window: True
width: 200
height: 200
robot_radius: 0.1
resolution: 0.1
origin_x: -100.0
origin_y: -100.0
plugins: ["nvblox_base_layer", "nvblox_human_layer"]
nvblox_base_layer:
plugin: "nvblox::nav2::NvbloxCostmapLayer"
enabled: True
max_obstacle_distance: 1.0
inflation_distance: 0.4
nvblox_map_slice_topic: "/nvblox_node/static_map_slice"
nvblox_human_layer:
plugin: "nvblox::nav2::NvbloxCostmapLayer"
enabled: True
max_obstacle_distance: 1.0
inflation_distance: 0.4
nvblox_map_slice_topic: "/nvblox_human_node/human_map_slice"
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: False
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: False
planner_server:
ros__parameters:
expected_planner_frequency: 10.0
use_sim_time: False
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: false
allow_unknown: true
planner_server_rclcpp_node:
ros__parameters:
use_sim_time: False
smoother_server:
ros__parameters:
use_sim_time: False
smoother_plugins: ["simple_smoother"]
simple_smoother:
plugin: "nav2_smoother::SimpleSmoother"
tolerance: 1.0e-10
max_its: 1000
do_refinement: True
behavior_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 5.0
behavior_plugins: ["spin", "backup", "drive_on_heading", "wait"]
spin:
plugin: "nav2_behaviors/Spin"
backup:
plugin: "nav2_behaviors/BackUp"
drive_on_heading:
plugin: "nav2_behaviors/DriveOnHeading"
wait:
plugin: "nav2_behaviors/Wait"
global_frame: odom
robot_base_frame: base_link
transform_tolerance: 0.2
use_sim_time: False
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 1.0
robot_state_publisher:
ros__parameters:
use_sim_time: False
waypoint_follower:
ros__parameters:
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200
- src/isaac_ros_nvblox/nvblox_examples/nvblox_examples_bringup/launch/nav2/nav2_realsense.launch.py
import os
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
config_path = os.path.join(
'/workspaces/isaac_ros-dev/src/isaac_ros_nvblox/nvblox_examples/nvblox_examples_bringup/config/nav2',
'nav2_realsense.yaml'
)
return LaunchDescription([
Node(
package='nav2_controller',
executable='controller_server',
name='controller_server',
output='screen',
parameters=[config_path]
),
Node(
package='nav2_planner',
executable='planner_server',
name='planner_server',
output='screen',
parameters=[config_path]
),
Node(
package='nav2_bt_navigator',
executable='bt_navigator',
name='bt_navigator',
output='screen',
parameters=[config_path]
),
Node(
package='nav2_behaviors',
executable='behavior_server',
name='behavior_server',
output='screen',
parameters=[config_path]
),
Node(
package='nav2_waypoint_follower',
executable='waypoint_follower',
name='waypoint_follower',
output='screen',
parameters=[config_path]
),
Node(
package='nav2_lifecycle_manager',
executable='lifecycle_manager',
name='lifecycle_manager_navigation',
output='screen',
parameters=[{
'use_sim_time': False,
'autostart': True,
'node_names': [
'controller_server',
'planner_server',
'bt_navigator',
'behavior_server',
'waypoint_follower'
]
}]
),
])
- src/isaac_ros_nvblox/nvblox_examples/nvblox_examples_bringup/launch/realsense_nav2_example.launch.py
from isaac_ros_launch_utils.all_types import *
import isaac_ros_launch_utils as lu
from nvblox_ros_python_utils.nvblox_launch_utils import NvbloxMode, NvbloxCamera
from nvblox_ros_python_utils.nvblox_constants import NVBLOX_CONTAINER_NAME
def generate_launch_description() -> LaunchDescription:
args = lu.ArgumentContainer()
args.add_arg('log_level', 'info')
args.add_arg('num_cameras', 1)
args.add_arg('mode', default=NvbloxMode.static, cli=True)
args.add_arg('run_rviz', default='True')
args.add_arg('use_foxglove_whitelist', True)
args.add_arg('container_name', NVBLOX_CONTAINER_NAME)
args.add_arg('global_frame', default='odom')
actions = args.get_launch_actions()
actions.append(
Node(
package='tf2_ros',
executable='static_transform_publisher',
name='camera_mount_tf',
arguments=['0.015', '0', '0.122', '0', '0', '0', '1', 'base_link', 'camera0_link'],
)
)
# Start container early so composables can be loaded
actions.append(
lu.component_container(args.container_name, log_level=args.log_level)
)
# Launch Realsense camera
actions.append(
lu.include(
'nvblox_examples_bringup',
'launch/sensors/realsense.launch.py',
launch_arguments={
'container_name': args.container_name,
'num_cameras': args.num_cameras
}
)
)
# Launch Visual SLAM
actions.append(
lu.include(
'nvblox_examples_bringup',
'launch/perception/vslam.launch.py',
launch_arguments={
'container_name': args.container_name,
'camera': str(NvbloxCamera.realsense),
'output_odom_frame_name': args.global_frame
}
)
)
# Launch NVBlox Mapping
actions.append(
lu.include(
'nvblox_examples_bringup',
'launch/perception/nvblox.launch.py',
launch_arguments={
'container_name': args.container_name,
'mode': args.mode,
'camera': str(NvbloxCamera.realsense),
'num_cameras': args.num_cameras
}
)
)
# Launch Nav2
actions.append(
lu.include(
'nvblox_examples_bringup',
'launch/nav2/nav2_realsense.launch.py'
)
)
# Optional: RViz
actions.append(
lu.include(
'nvblox_examples_bringup',
'launch/visualization/visualization.launch.py',
launch_arguments={
'mode': args.mode,
'camera': str(NvbloxCamera.realsense),
'use_foxglove_whitelist': args.use_foxglove_whitelist
},
condition=IfCondition(args.run_rviz)
)
)
return LaunchDescription(actions)