I’m trying to make a facial emotion classification program through a video stream. I’m using Jetson Nano 2GB and swap memory and csi camera raspberry pi v2, and python 3 in my virtualenv. I have installed opencv 4.1 which supports gstreamer. I’ve tried the csi camera code from github and it worked to open the camera. I don’t think there is an error, but the video stream doesn’t come out and the program stops. here is my code :
import numpy as np
import cv2
from keras.preprocessing import image
#-----------------------------
#opencv initialization
def gstreamer_pipeline(
capture_width=1280,
capture_height=720,
display_width=1280,
display_height=720,
framerate=60,
flip_method=0,
):
return (
"nvarguscamerasrc ! "
"video/x-raw(memory:NVMM), "
"width=(int)%d, height=(int)%d, "
"format=(string)NV12, framerate=(fraction)%d/1 ! "
"nvvidconv flip-method=%d ! "
"video/x-raw, width=(int)%d, height=(int)%d, format=(string)BGRx ! "
"videoconvert ! "
"video/x-raw, format=(string)BGR ! appsink"
% (
capture_width,
capture_height,
framerate,
flip_method,
display_width,
display_height,
)
)
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
# To flip the image, modify the flip_method parameter (0 and 2 are the most common)
cap = cv2.VideoCapture(gstreamer_pipeline(flip_method=0), cv2.CAP_GSTREAMER)
#face expression recognizer initialization
from keras.models import model_from_json
model = model_from_json(open("facial_expression_model_structure.json", "r").read())
model.load_weights('facial_expression_model_weights.h5') #load weights
#-----------------------------
emotions = ('angry', 'disgust', 'fear', 'happy', 'sad', 'surprise', 'neutral')
def show_camera():
if cap.isOpened():
window_handle = cv2.namedWindow("CSI Camera", cv2.WINDOW_AUTOSIZE)
# Window
while cv2.getWindowProperty("CSI Camera", 0) >= 0:
ret_val, img = cap.read()
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
faces = face_cascade.detectMultiScale(gray, 1.3, 5)
#print(faces) #locations of detected faces
for (x,y,w,h) in faces:
cv2.rectangle(img,(x,y),(x+w,y+h),(255,0,0),2) #draw rectangle to main image
detected_face = img[int(y):int(y+h), int(x):int(x+w)] #crop detected face
detected_face = cv2.cvtColor(detected_face, cv2.COLOR_BGR2GRAY) #transform to gray scale
detected_face = cv2.resize(detected_face, (48, 48)) #resize to 48x48
img_pixels = image.img_to_array(detected_face)
img_pixels = np.expand_dims(img_pixels, axis = 0)
img_pixels /= 255 #pixels are in scale of [0, 255]. normalize all pixels in scale of [0, 1]
predictions = model.predict(img_pixels) #store probabilities of 7 expressions
#find max indexed array 0: angry, 1:disgust, 2:fear, 3:happy, 4:sad, 5:surprise, 6:neutral
max_index = np.argmax(predictions[0])
emotion = emotions[max_index]
#write emotion text above rectangle
cv2.putText(img, emotion, (int(x), int(y)), cv2.FONT_HERSHEY_SIMPLEX, 1, (255,255,255), 2)
#process on detected face end
cv2.imshow("CSI Camera", img)
# This also acts as
keyCode = cv2.waitKey(30) & 0xFF
# Stop the program on the ESC key
if keyCode == 27:
break
cap.release()
cv2.destroyAllWindows()
else:
print("Unable to open camera")
and this is the output
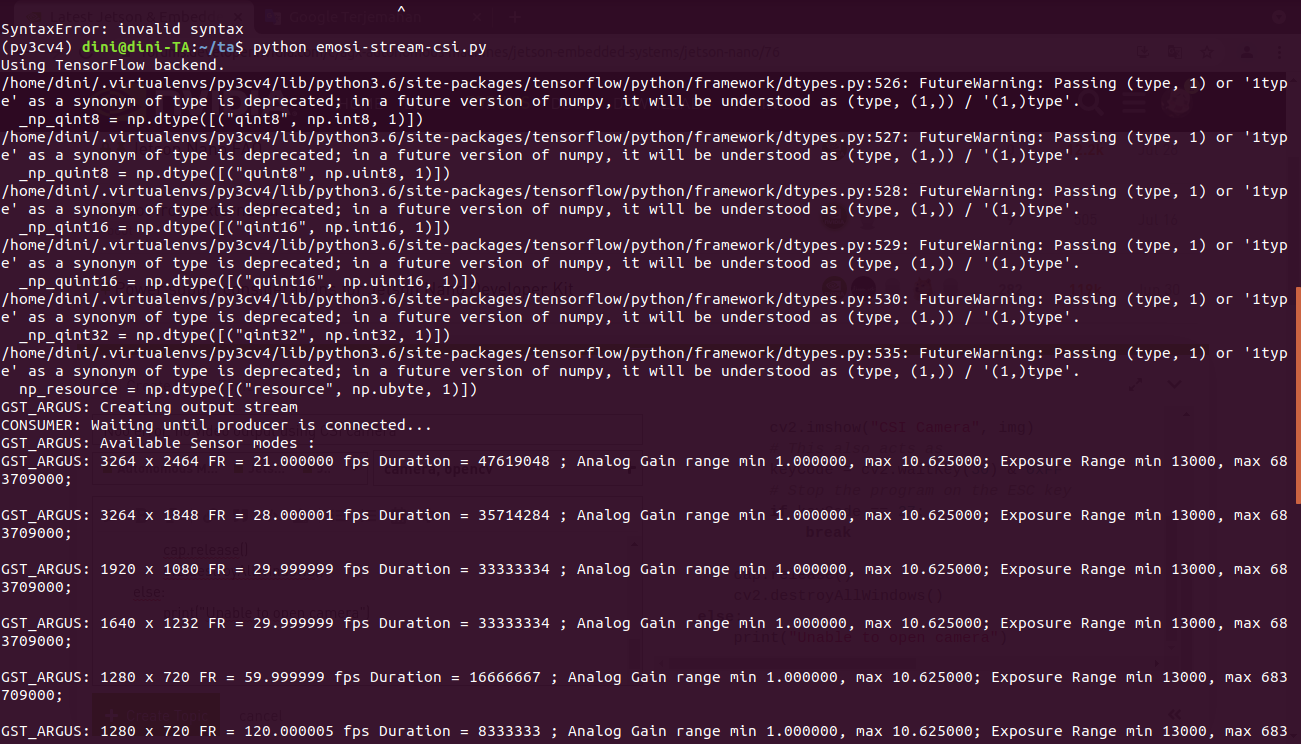
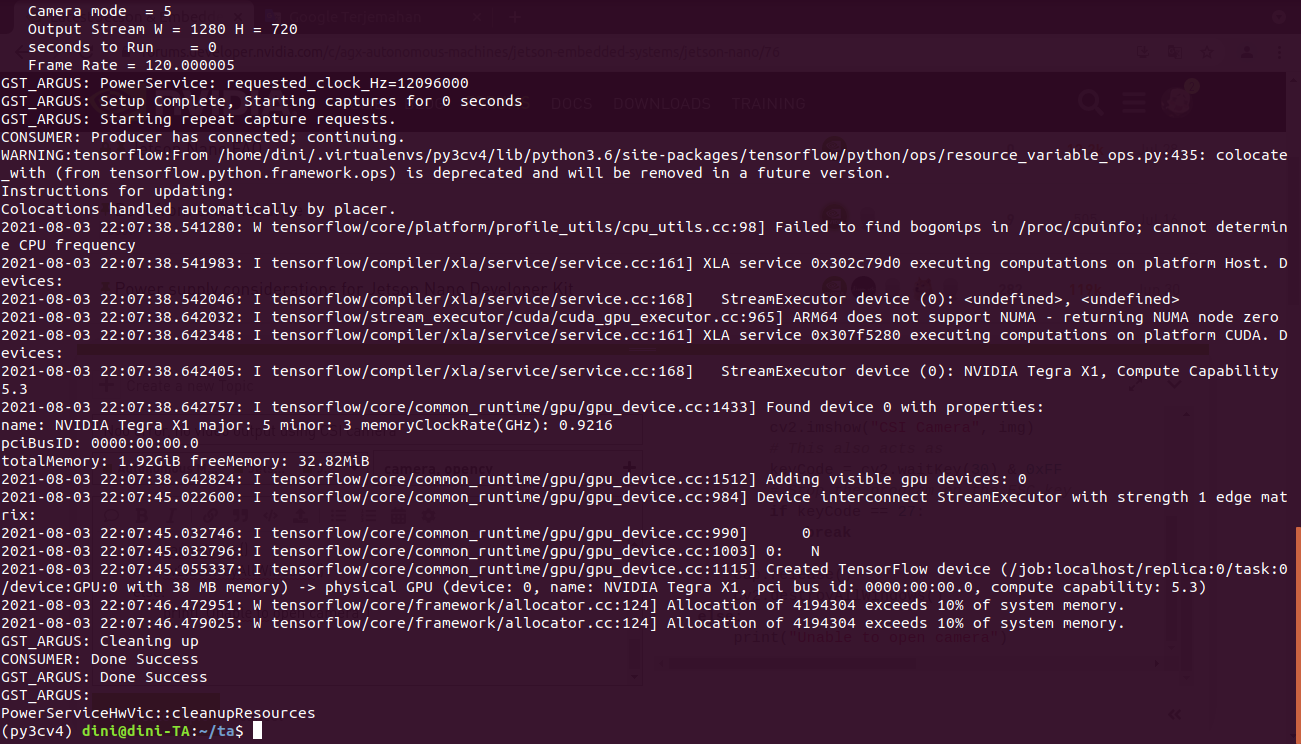
please anyone help me?