I did make a thread regarding modifying the values for point_cloud_range. Now I just have some other questions in my mind.
Still, I will just pose the related document here, first.
I intended to detect people within a specified range so compared with the default values for point_cloud_range, the effective range has been largely decreased.
For point_cloud_range, it’s now [-11.52, -11.52, -3, 11.52, 11.52, 1] instead of [0, -39.68, -3, 69.12, 39.68, 1] as I only want to detect people that show up within a range. There’s no way people would show up in the distance if I just hope to do 3D object detection using this model indoors.
On the other hand, aside from KITTI dataset, I’ve also managed to download and convert other datasets, including nuScenes, into KITTI format and they compose my training set with KITTI dataset that has already been used. As for the validation set, so far it still only consists of those from KITTI dataset.
However, it seems that some of the datasets I have converted help enhance the AP while some don’t.
Some datasets seem to be synthesized, such as PreSIL.
I tried adding some PreSIL samples along with KITTI dataset to form my training set and this resulted in nearly 8% decrease in mAP.
PreSIL data lacks intensity value, which seems to be 0 for all the point clouds. I guess it’s okay to call it fake lidar.
I once again looked into the document page and noticed a parameter “database_with_fakelidar”.
Regarding this here’re 2 questions:
-
What is this parameter for? Should I set it to True if my training set contains fake lidar data as mentioned before?
-
The default “pointpillars.yaml” file doesn’t include this parameter. Instead, a parameter named “disable_with_fake_lidar” is included and set to False as default, but the parameter isn’t really mentioned in the document page but still shows up in the “Creating an experiment spec file” part:
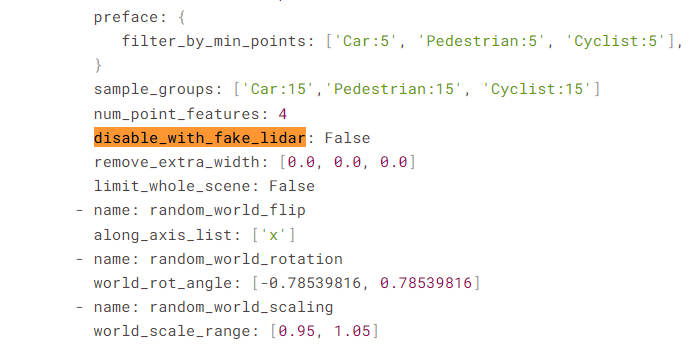

The inconsistency confuses me. Which one of both is actually the parameter that exists and how am I supposed to use it?
I once again uploaded the spec file of mine here.
pointpillars.txt (5.6 KB)