I am trying to learn Autonomous Cars… I am totally new to these things I am trying to do my self driving rc car(1/10 scale). Like Donkeycar.
But i want to realize it with ROS.
I got rpi camera V2. I searched internet and just find that i can use rpi camera with ros kinetic. Are there any way to rpi camera with Jetson Nano on ROS. Cause as i can learned i can only install ros melodic to jetson nano.
My questions are:
Can i use ros kinetic with jetson nano
Can i use rpi cam with ros melodic
There is a node for rpi camera like i said (in ros Kinetic) can i use this node in ros melodic
For me it’s urgent. I would be grateful for any help.
Can you help me.
Thanks.
I checked the link i followed the instructions. And install them except Adafruit MotorHAT.
Firstly i couldnt install Adafruit Motorhat when i try " pip install Adafruit-MotorHAT"
This error comes up:
> Collecting Adafruit-MotorHAT
> Using cached https://files.pythonhosted.org/packages/f3/4a/550e347249b21ad82d0dd1de7f6d7af8e5b06adfe2226fd1965f6cfa80aa/Adafruit_MotorHAT-1.4.0-py2-none-any.whl
> Collecting Adafruit-GPIO>=0.7 (from Adafruit-MotorHAT)
> Could not find a version that satisfies the requirement Adafruit-GPIO>=0.7 (from Adafruit-MotorHAT) (from versions: )
> No matching distribution found for Adafruit-GPIO>=0.7 (from Adafruit-MotorHAT)
Secondly i couldnt find much informations about Adafruit MotorHAT. I am trying to use PCA9685. Is it capable to use with these packages?
Thirdly I tried some things for launching rpi cam with jetbot_ros node and also ros_deep_learning nodes but couldnt find or stucked. Can you help me about it?
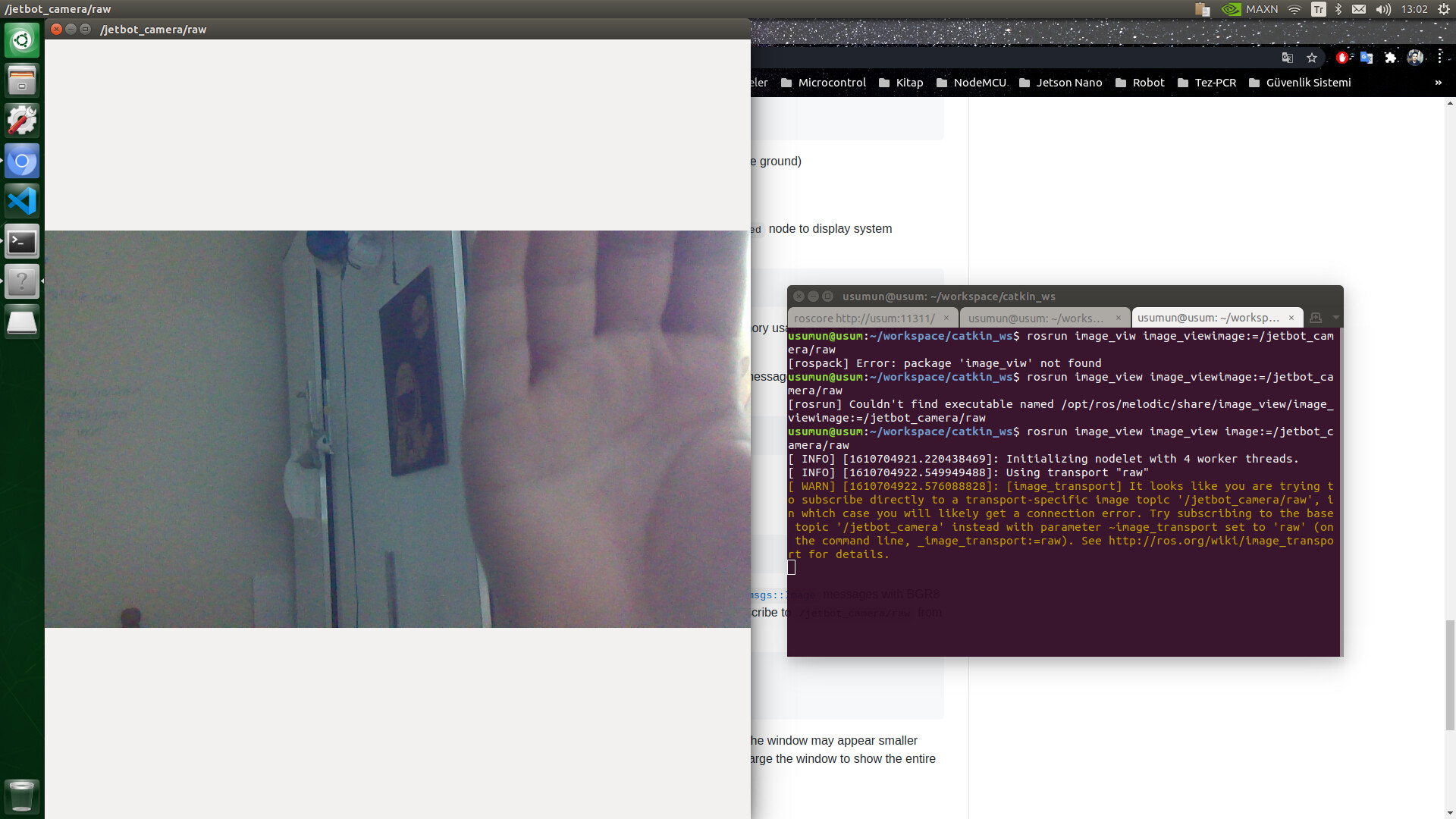
I am able to use camera with jetbot_camera node. Appreciate that :D
But now i am confused about how can i use my motors. I think i can’t use all package(jetbot_ros) with my rc car. It is not capable with it. At least i am using PCA9685.
Now what should i do now? Finding a PCA9685 ROS node and using it with jetbot_camera node . Am i right?
Actually i didn’t understand driver thing exactly. Because i am using ROS and it’s like an environnement so if i find a node or package for PCA9685 isn’t it enough to use? Do I still need to download the driver?
There are two examples of Jetson Nano controlling wheeled robots. If you are using a PCA9685 PWM to drive an H-Bridge, then look at the JetBot example. If you are using PCA9685 to generate RC Servo contol signals, then have a look at the Jetracer example. I suspect that since you mentioned DonkeyCar, Jetracer might be your best bet.
Also the help you are likely to seek now is probably more ROS related than Nano related so if might be helpful to search ROS information sources as well (e.g. https://discourse.ros.org/)