Hello, community.
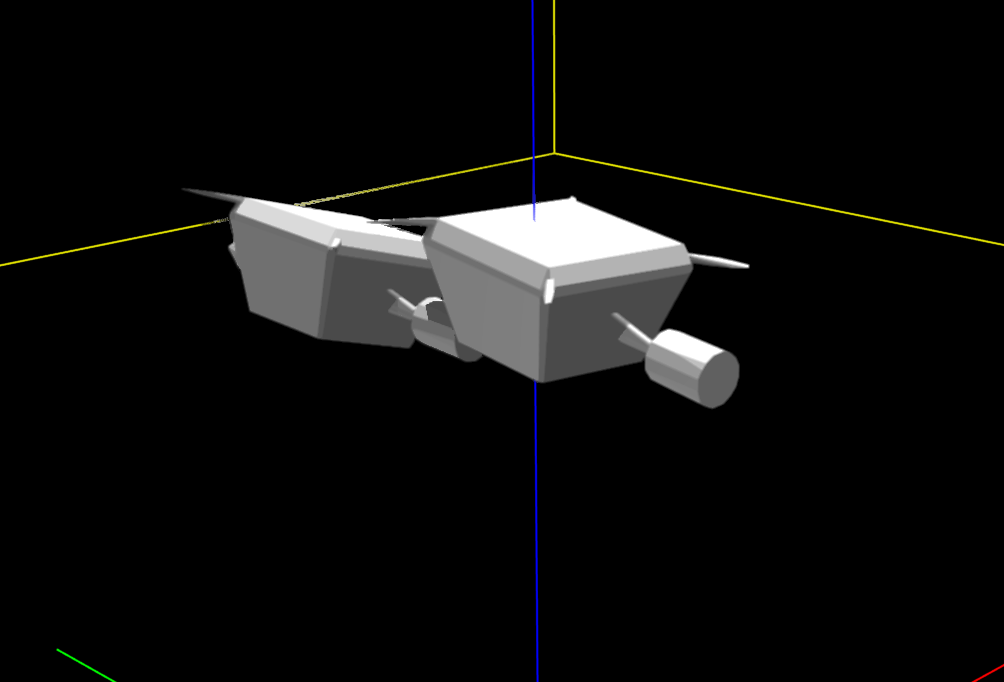
When importing files into IsaacGym using URDF files, I noticed that IsaacGym simplifies the collision model while the visual model remains correct. As shown in the images, the first image is the correct visual model, and the second image is the simplified collision model. My import settings are as follows. Could you please help identify what might be causing this issue?
collision_filter = 0
replace_cylinder_with_capsule = False
flip_visual_attachments = False
convex_decomposition_from_submeshes = True
thickness = 0.001
fix_base_link = False
armature = 0.001
max_angular_velocity = 100.0
angular_damping = 0.0
linear_damping = 0.0
max_linear_velocity = 100.0
disable_gravity = False
enable_gyroscopic_forces = True
use_mesh_materials = False
override_com = False
override_inertia = False
collapse_fixed_joints = False
density = 0.001
class VhacdParamsConfig2:
resolution = 1,000,000
max_convex_hulls = 50
max_num_vertices_per_ch = 256
concavity = 0.0005
plane_downsampling = 2
convex_hull_downsampling = 2
alpha = 0.05
beta = 0.05
pca = False
mode = 0
max_num_vertices_per_face = 128
min_volume_per_ch = 0.0001
vhacd_enabled = True
vhacd_params = VhacdParamsConfig()