As the title suggests, when using the “RealSense RSD455” camera in Isaac Sim 4.5 and running ros2 launch nvblox_examples_bringup isaac_sim_example.launch.py to test NVBlox, I found that NVBlox fails to construct the TSDF map. However, when I use the “Leopard Hawk camera”, NVBlox works as expected. Could you please advise on how to resolve this issue?
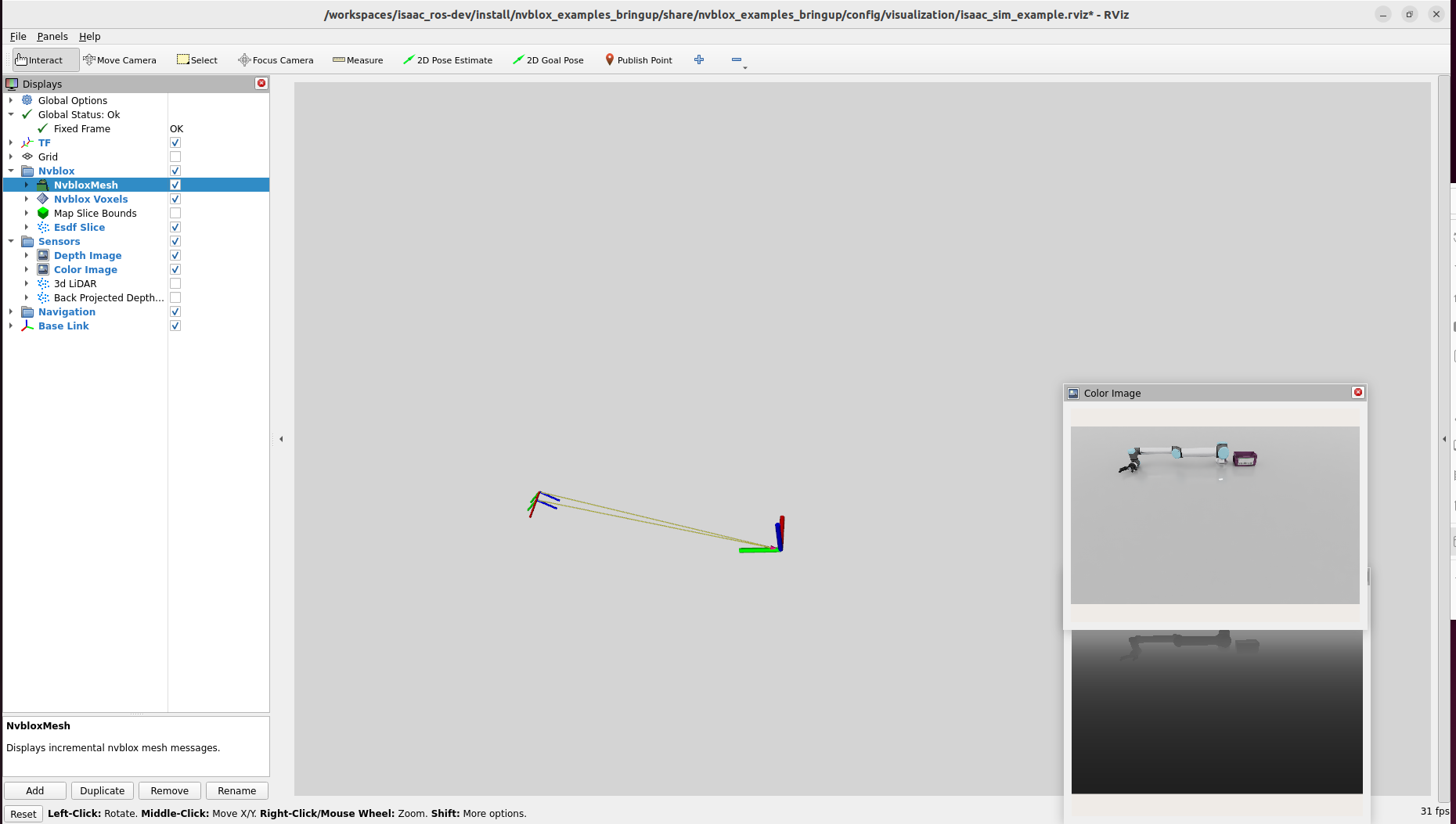
Rviz2
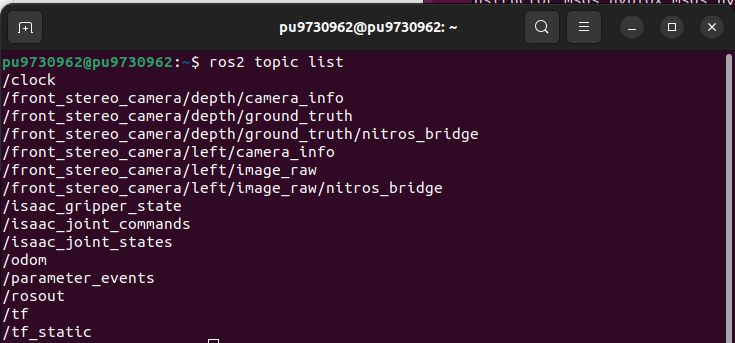
I performed the following three experiments to assist in analyzing the problem.
Case1:
Create two “Isaac Create Render Products” and set cameraPrim to “/World/hawk_manipulator/left/camera_right” and “/World/hawk_manipulator/left/camera_left” respectively. Also, in the “ROS2 Publish Transform Tree”, set the targetPrims to “/World/hawk_manipulator/left/camera_right” and “/World/hawk_manipulator/left/camera_left” . With this setup, NVblox in Rviz2 can display correctly.
Case2:
Create two “Isaac Create Render Products” and set cameraPrim to “/World/rsd455/RSD455/Camera_OmniVision_OV9782_Right” and “/World/rsd455/RSD455/Camera_OmniVision_OV9782_Left” respectively. Also, in the “ROS2 Publish Transform Tree”, set the targetPrims to “/World/rsd455/RSD455/Camera_OmniVision_OV9782_Right” and “/World/rsd455/RSD455/Camera_OmniVision_OV9782_Left” . With this setup, NVblox in Rviz2 can’t display correctly.
Case3:
Create two “Isaac Create Render Products” and set cameraPrim to “/World/rsd455/RSD455/Camera_OmniVision_OV9782_Right” and “/World/rsd455/RSD455/Camera_OmniVision_OV9782_Left” respectively. Also, in the “ROS2 Publish Transform Tree”, set the targetPrims to “/World/hawk_manipulator/left/camera_right” and “/World/hawk_manipulator/left/camera_left”. With this setup, NVblox in Rviz2 can display correctly.