Hello , I have been looking , I am using the resberri camera, I am doing the hello camera, and the output image is inverted or flipped
tried to run this :
To rotate 180 degrees
To rotate video 180 degrees, enter the following command:
gst-launch-1.0 nvarguscamerasrc!
‘video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080,
format=(string)NV12, framerate=(fraction)30/1’ !
nvvidconv flip-method=2 !
‘video/x-raw(memory:NVMM), format=(string)I420’ ! nvoverlaysink -e
still the same the image is flip… some suggestions
Does any effect for set the flip-method as others value?
flip-method : video flip methods
flags: readable, writable, controllable
Enum "GstNvVideoFlipMethod" Default: 0, "none"
(0): none - Identity (no rotation)
(1): counterclockwise - Rotate counter-clockwise 90 degrees
(2): rotate-180 - Rotate 180 degrees
(3): clockwise - Rotate clockwise 90 degrees
(4): horizontal-flip - Flip horizontally
(5): upper-right-diagonal - Flip across upper right/lower left diagonal
(6): vertical-flip - Flip vertically
(7): upper-left-diagonal - Flip across upper left/lower right diagonal
I saw this : just to make sure if I am new in this jetson nano:
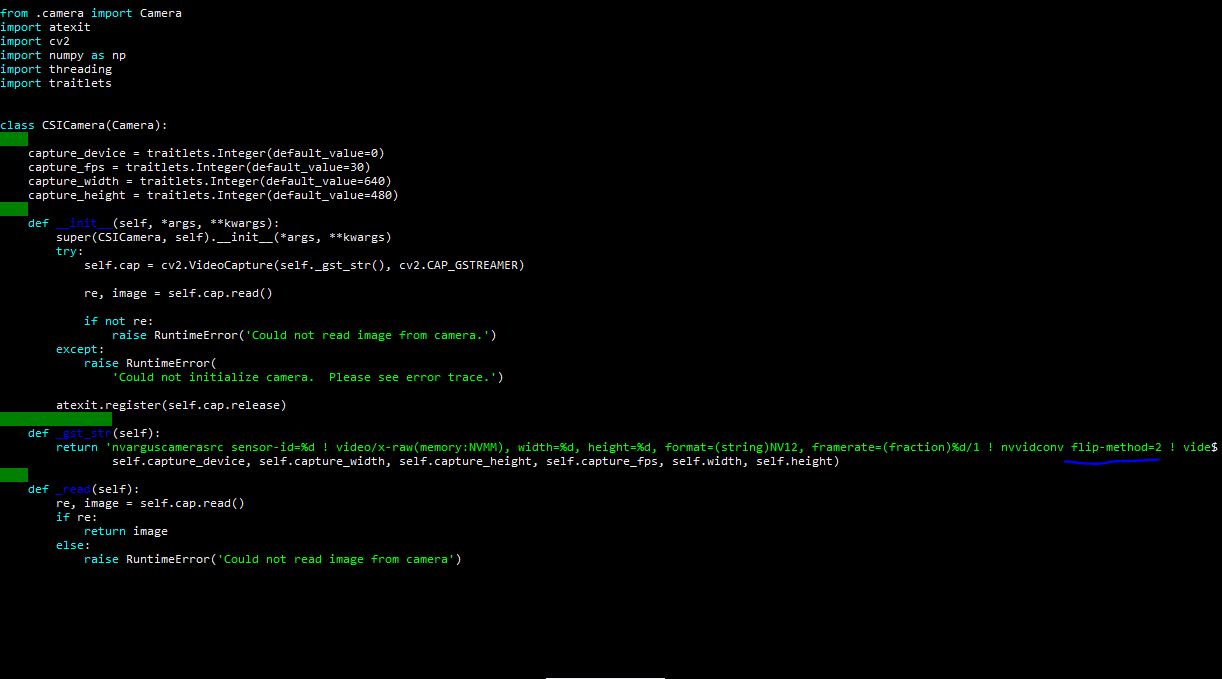
I am not sure if I am running the right command. here I am share a screenshots.
I had reboot the nano, restarted container , after tried different numbers and still image is flip…also When I run this command , gets to the Consumer: Producer has connected , continuing, nothing happen, I have to press crt+C to finishih…
after crt+c
thanks
What’s the version?
There’s no problem for me on J4.4(r32.4.x)
I am using r32.5.0
where I can check that J4.4?
You can download it from sdkmanager.
I am using windows to connect to the nano, I see that is required to have linux Operating system on a pc to be able to download that…
Yes, you need ubuntu host PC to run the sdkmanager.
BTW, I don’t think J4.5 have problem. Will confirm it later.
1 Like
@jonathan3110 do you have a display attached to your Jetson, or are you running the gstreamer pipeline heedlessly? You need a display attached in order to see video from your gst-launch pipeline or from nvgstcapture-1.0. The DLI notebooks do some special piping over the network so you can see the video without physical display connected to the Jetson.
At this point you shouldn’t need to reflash JetPack I don’t think, so you shouldn’t need SDK Manager either.
If you want to set the flip-method inside of the DLI notebooks, please see this post:
1 Like
Hi, Have make the changes , the last step python3 setup.py install, I had installinstall pytho3, but is showing I have python 2.7.
I had reboot PC, disconnect the camera connect again.
looks the same…
Hi @jonathan3110, sorry for the delay - you would need to do those steps inside the container. After you start the container, you will be given a root prompt (# symbol). That prompt is running inside the container. Then clone jetcam from that prompt, make the edits to set the desired flip-method (using text editor inside the container like nano or vi), and then install it in the container with python3 - all from that container prompt.
Hi Dusty ,thanks , now I have started the hello AI ,
OK gotcha. You may have already found this, but in Hello AI World programs you can simply use the --input-flip=rotate-180 command-line argument to flip the camera image. For more info, see here:
https://github.com/dusty-nv/jetson-inference/blob/master/docs/aux-streaming.md#input-options