Note: For any Isaac Lab topics, please submit your topic to its GitHub repo (GitHub - isaac-sim/IsaacLab: Unified framework for robot learning built on NVIDIA Isaac Sim) following the instructions provided on Isaac Lab’s Contributing Guidelines (Contribution Guidelines — Isaac Lab Documentation).
Please provide all relevant details below before submitting your post. This will help the community provide more accurate and timely assistance. After submitting, you can check the appropriate boxes. Remember, you can always edit your post later to include additional information if needed.
Isaac Sim Version
[√] 4.5.0
4.2.0
4.1.0
4.0.0
4.5.0
2023.1.1
2023.1.0-hotfix.1
Other (please specify):
Operating System
[√] Ubuntu 22.04
Ubuntu 20.04
Windows 11
Windows 10
Other (please specify):
Topic Description
Detailed Description
(Describe the issue in detail, including what you were trying to do, what you expected to happen, and what actually happened)
I want to show an object in wireframe mode, my object is a IsaacLab object (loaded in RigidPrim). But I did not find any description about wireframe mode or semitransparent when loading an object, in some cases, wireframe really better sees the contact. So would you mind tell me how to make it ?
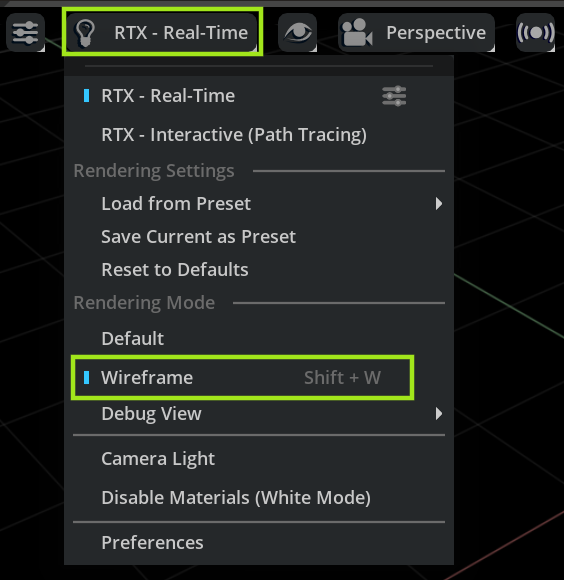
@2230580090 the way kit displays wireframe a little differently, and it tends to be global rather than on selected mesh prims (at least in my experience). the shortcut for wireframe is Shift + W or if you were to change it via GUI, it’s part of the viewport setting:
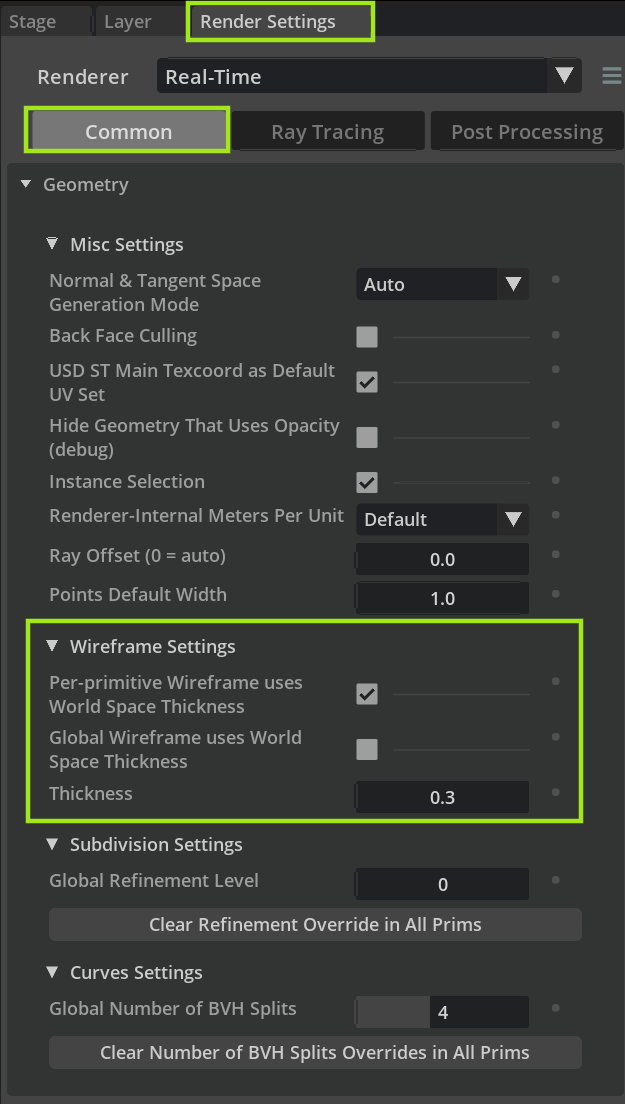
additional wireframe display settings can be configured inside of Render Settings:
and here is one snippet you could use to toggle wireframe visibility programmatically:
import omni.kit.actions.core
action_registry = omni.kit.actions.core.get_action_registry()
action = action_registry.get_action("omni.kit.viewport.actions", "toggle_wireframe")
action.execute()
1 Like
Thanks for your reply, one specific object can not use wireframe mode.
correct, the viewport wireframe mode is a global effect.
another possibility could be done on a shader level to apply transparency, but that approach could have its own downside depending on the number of mesh prims you are looking to have that effect. transparency can be expensive to render, especially when trying to trace layers of translucent surfaces. if you have a high end GPU, it may be discernible but can take toll on less powerful cards.
Thanks a lot ! And besides I did not find six-dimensional force sensor in isaacsim.api.sensors, what to do if I want to record forces in robot’s end.