I have the following code which basically just randomizes the position of a worker inside a plane.
import omni.replicator.core as rep
from datetime import datetime
import omni.usd
# import omni.isaac.core.utils.bounds as bounds_utils
# import omni.isaac.core.utils.prims as prims_utils
with rep.new_layer():
# Define paths for the character, the props, the environment and the surface where the assets will be scattered in.
WORKER = 'omniverse://localhost/NVIDIA/Assets/Characters/Reallusion/Worker/Worker.usd'
plane = rep.create.plane(scale=100, visible=True, semantics=[("class", "plane")])
print('type of plane: ', print(plane))
# bb_cache = bounds_utils.create_bbox_cache()
# combined_range_arr = bounds_utils.compute_combined_aabb(bb_cache, prim_paths=plane)
# print('combined_range_arr: ', combined_range_arr)
def worker():
worker = rep.create.from_usd(WORKER, semantics=[('class', 'worker')])
with worker:
rep.modify.pose(
position=rep.distribution.uniform((-1000, 0, -1000), (1000, 0, 1000)),
rotation=rep.distribution.uniform((-90,-45, 0), (-90, 45, 0)),
)
return worker
# Register randomization
rep.randomizer.register(worker)
# Setup camera and attach it to render product
camera = rep.create.camera(
focus_distance=800,
f_stop=0.5
)
render_product = rep.create.render_product(camera, resolution=(1024, 1024))
timestamp = datetime.now().strftime("%Y_%m_%d-%I_%M_%S_%p")
# Initialize and attach writer
writer = rep.WriterRegistry.get("BasicWriter")
writer.initialize(output_dir="/home/mona/Desktop/Isaac_Sim_Dummy_Out/vegetation/" + timestamp , rgb=True, bounding_box_2d_tight=True)
writer.attach([render_product])
with rep.trigger.on_frame(num_frames=100):
rep.randomizer.worker()
with camera:
rep.modify.pose(position=rep.distribution.uniform((-500, 200, 1000), (500, 500, 1500)), look_at=plane)
Here, if I change the look_at to worker it gonna throw an error since worker is a function.
Also, given the current code, there are naturally situations when the camera only takes photos of the plane and not the worker.
So,
- if I have one object of interest, how can I force a camera with randomized position to always look the the object of interest?
- if I have multiple objects of interest, how can I force a camera with randomized position to always look at the mean pose of objects of interest or something similar?
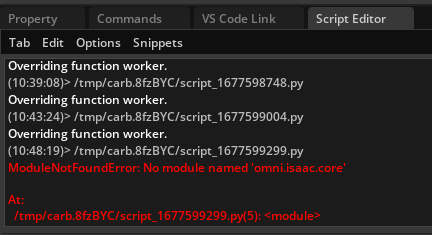
I am using Omniverse Code Replicator and dumped the code in Script Editor, hit Run and then clicked on Replicator → Start.

For example, rgb_0099.png is not capturing the object of interest, here, the worker.
Also, how can I get the bounding box of an object, here the plane? I don’t have access to functions from Isaac Sim inside Omniverse Code @toni.sm
Further, why is type of plane is stated as None? Isn’t a prim? I intend to pass the plane to compute_combined_aabb like below:

bb_cache = bounds_utils.create_bbox_cache()
combined_range_arr = bounds_utils.compute_combined_aabb(bb_cache, prim_paths=plane)
print('combined_range_arr: ', combined_range_arr)
The goal of finding the bbox is to ensure the worker is not spawn outside of plane.