Hi,
I want to to generate synthetic data of a robot manipulator with random camera poses and joint positions. I did a minimal example based on randomization_demo.py.
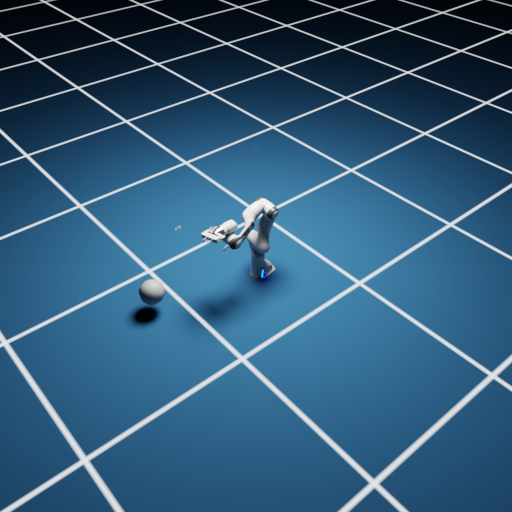
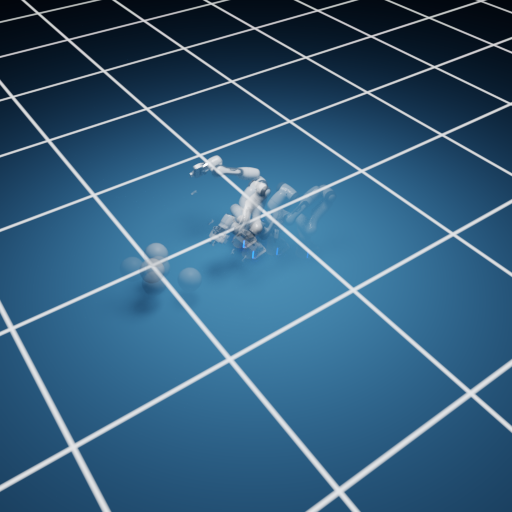
The problem is that the robot moves when the writer is rendering/saving the images, and consequently, the generated images are blurry. How could I circumvent this?
Generated image:
I really apreciate if anyone can help me.
Thank you in advance,
Juan
Minimal example:
from omni.isaac.kit import SimulationApp
CONFIG = {"renderer": "PathTracing", "headless": False, "width": 512, "height": 512, "num_frames": 10, "multi_gpu": True}
simulation_app = SimulationApp(CONFIG)
import carb
import numpy as np
from omni.isaac.core import World
from omni.isaac.core.prims import RigidPrimView
from omni.isaac.core.articulations import ArticulationView
from omni.isaac.core.utils.prims import get_prim_at_path, define_prim
from omni.isaac.core.utils.stage import get_current_stage, add_reference_to_stage
from omni.isaac.core.utils.nucleus import get_assets_root_path
from omni.isaac.core.objects import DynamicSphere
from omni.isaac.cloner import GridCloner
# create the world
world = World(stage_units_in_meters=1.0, physics_prim_path="/physicsScene", backend="numpy")
assets_root_path = get_assets_root_path()
if assets_root_path is None:
carb.log_error("Could not find Isaac Sim assets folder, closing app..")
simulation_app.close()
usd_path = assets_root_path + "/Isaac/Environments/Grid/default_environment.usd"
add_reference_to_stage(usd_path=usd_path, prim_path="/World/defaultGroundPlane")
# set up grid cloner
cloner = GridCloner(spacing=1.5)
cloner.define_base_env("/World/envs")
define_prim("/World/envs/env_0")
# set up the first environment
DynamicSphere(prim_path="/World/envs/env_0/object", radius=0.1, position=np.array([0.75, 0.0, 0.2]))
add_reference_to_stage(
usd_path=assets_root_path + "/Isaac/Robots/Franka/franka.usd", prim_path="/World/envs/env_0/franka"
)
# clone environments
num_envs = 1
prim_paths = cloner.generate_paths("/World/envs/env", num_envs)
env_pos = cloner.clone(source_prim_path="/World/envs/env_0", prim_paths=prim_paths)
# creates the views and set up world
object_view = RigidPrimView(prim_paths_expr="/World/envs/*/object", name="object_view")
franka_view = ArticulationView(prim_paths_expr="/World/envs/*/franka", name="franka_view")
world.scene.add(object_view)
world.scene.add(franka_view)
world.reset()
num_dof = franka_view.num_dof
# set up randomization with omni.replicator.isaac, imported as dr
import omni.replicator.isaac as dr
import omni.replicator.core as rep
dr.physics_view.register_simulation_context(world)
dr.physics_view.register_rigid_prim_view(object_view)
dr.physics_view.register_articulation_view(franka_view)
with dr.trigger.on_rl_frame(num_envs=num_envs):
with dr.gate.on_interval(interval=20):
dr.physics_view.randomize_simulation_context(
operation="scaling", gravity=rep.distribution.uniform((1, 1, 0.0), (1, 1, 2.0))
)
with dr.gate.on_interval(interval=50):
dr.physics_view.randomize_rigid_prim_view(
view_name=object_view.name, operation="direct", force=rep.distribution.uniform((0, 0, 2.5), (0, 0, 5.0))
)
with dr.gate.on_interval(interval=10):
dr.physics_view.randomize_articulation_view(
view_name=franka_view.name,
operation="direct",
joint_velocities=rep.distribution.uniform(tuple([-2] * num_dof), tuple([2] * num_dof)),
)
with dr.gate.on_env_reset():
dr.physics_view.randomize_rigid_prim_view(
view_name=object_view.name,
operation="additive",
position=rep.distribution.normal((0.0, 0.0, 0.0), (0.2, 0.2, 0.0)),
velocity=[0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
)
dr.physics_view.randomize_articulation_view(
view_name=franka_view.name,
operation="additive",
joint_positions=rep.distribution.uniform(tuple([-0.5] * num_dof), tuple([0.5] * num_dof)),
position=rep.distribution.normal((0.0, 0.0, 0.0), (0.2, 0.2, 0.0)),
)
frames = 1000
camera = rep.create.camera(position=(3, 3, 3), clipping_range=(0.01, 10000.0))
#rep.set_global_seed(23)
rep.settings.set_render_pathtraced(samples_per_pixel=512)
rep.settings.carb_settings("/omni/replicator/RTSubframes", 3)
render_product = rep.create.render_product(camera, (512, 512))
with rep.trigger.on_frame(num_frames=frames, interval=1, rt_subframes=3):
with camera:
rep.modify.pose(
position=rep.distribution.uniform((2, 2, 2), (4, 4, 4)),
look_at="/World/envs/env_0/franka",
#scale=rep.distribution.uniform(0.1, 2)
)
# Initialize and attach writer
writer = rep.WriterRegistry.get("BasicWriter")
output_directory = r"E:\output\_out_sdrec_1"
print("Outputting data to ", output_directory)
writer.initialize(
output_dir=output_directory,
rgb=True,
)
writer.attach([render_product])
rep.orchestrator.run()
# Wait until started
while not rep.orchestrator.get_is_started():
simulation_app.update()
frame_idx = 0
while simulation_app.is_running():
if world.is_playing():
reset_inds = list()
if frame_idx % 200 == 0:
# triggers reset every 200 steps
reset_inds = np.arange(num_envs)
dr.physics_view.step_randomization(reset_inds)
world.step(render=True)
frame_idx += 1
simulation_app.close()