Hi Trumany,
Well, the signal quality on the I2C bus was a one of first question. Please, find my notes about that below.
In the very first, I need note that I’m not a EE, just a programmer. So, all my test in this area can be not complete, or even correct. If you will have any other questions/suggestion, please ask me …
-
I attach the screenshot from the scope for I2C bus without devices, the MLX camera is not powered but all other lines connected. The IR camera itself is 3.3V device, the PCB for camera powered from 5V. The SDA line on the screenshot (C1, yellow) is not goes high (no devices), and, seems, I2C controller even not try send a clock to the bus.
-
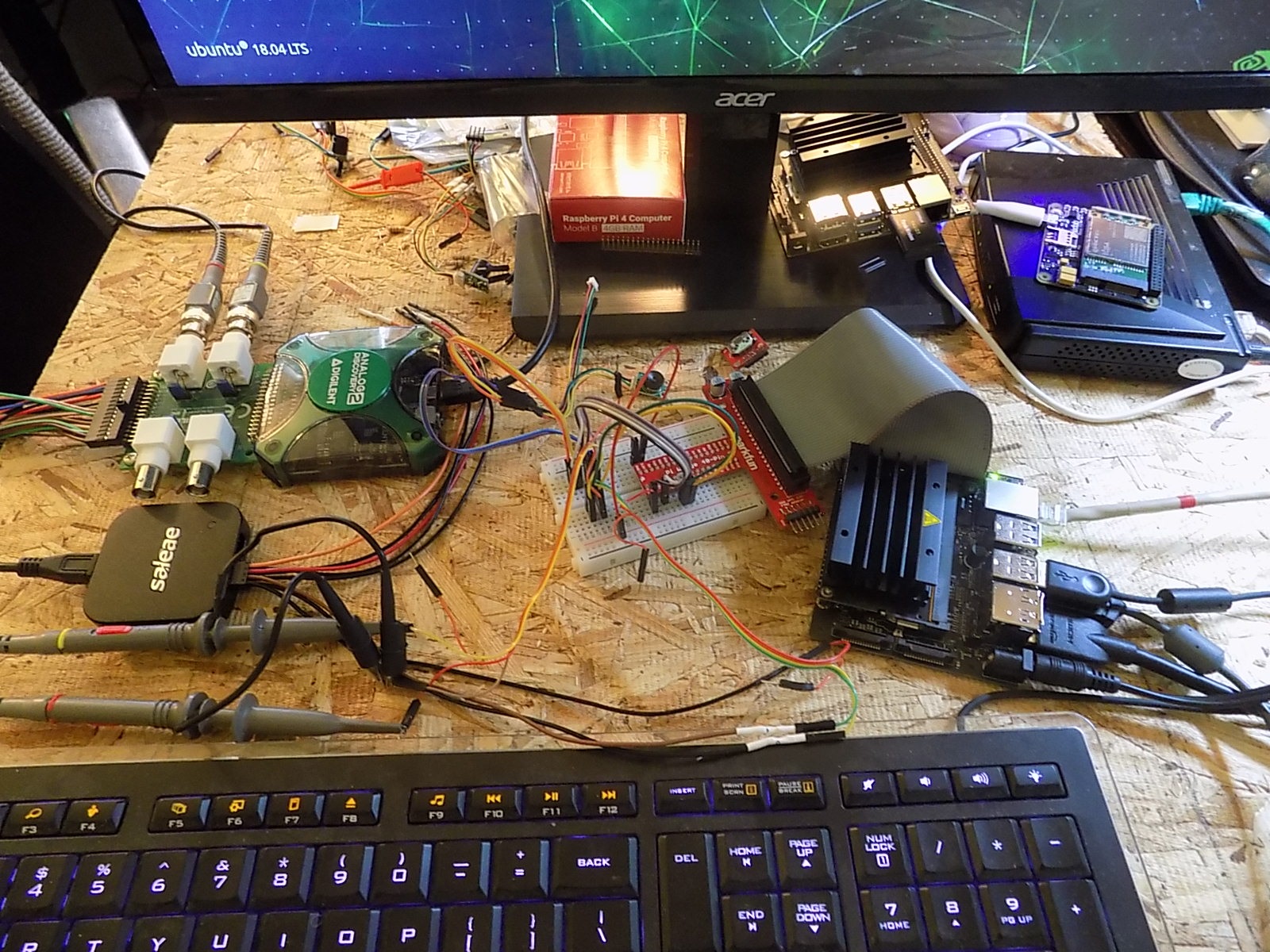
You can find a screenshot from the scope for I2C transaction with use RaspberryPi 3. in my post (I can send it separately). It looks better from the signal quality point view. I use exactly the same MLX camera, Pi Wedge for breakout 40pins cable on the breadboard, and all other wiring for test with Jetson Nano and Raspberry Pi. I attach a picture for my test bench just for illustration that.
-
I use three different types of logic analyzers: (a) LogicPort from pctestinstruments.com (2) analog discovery 2 from Digilent (it a scope but can works as a LA), (3) Seleae. The first one is chip but works OK with different projects last 5-8 years. But for this project is not works on I2C bus - the bus protocol interpreter can’t decode I2C transaction. It happen first time in my practice. Analog Discovery and Seleae works OK. (you can see that in my post). So, it look alike something not good with signals on the I2C bus.

Thanks,
Dmitriy Antonets
============= Update for this reply ===========
I try the same test with I2C read (I2C-1 bus) on Jetson TX2. It fails exactly the same way.
The post PM_I2C Issue seems can be close to this case: the I2C bus stall, and I2C controller reset it after some time… Just in case …
Thanks,
Dmitriy Antonets