Hi, Im trying to follow the NanoOwl tutorial (NanoOWL - NVIDIA Jetson AI Lab) and getting some critical errors from Gstreamer.
First i was trying to use csi cameras (2 of them), than I saw in github repository instructions to use a USB camera. The 3 cameras are connected at the moment of the print bellow:
Hi Cyato, thank you. It works with the usb camera.
Nanoowl github page is clear about using a USB camera, but can you point some direction/modification so it can work with csi cameras? When I try to run with other ids to use csi cameras, the difference in inicialization is the warnings above:
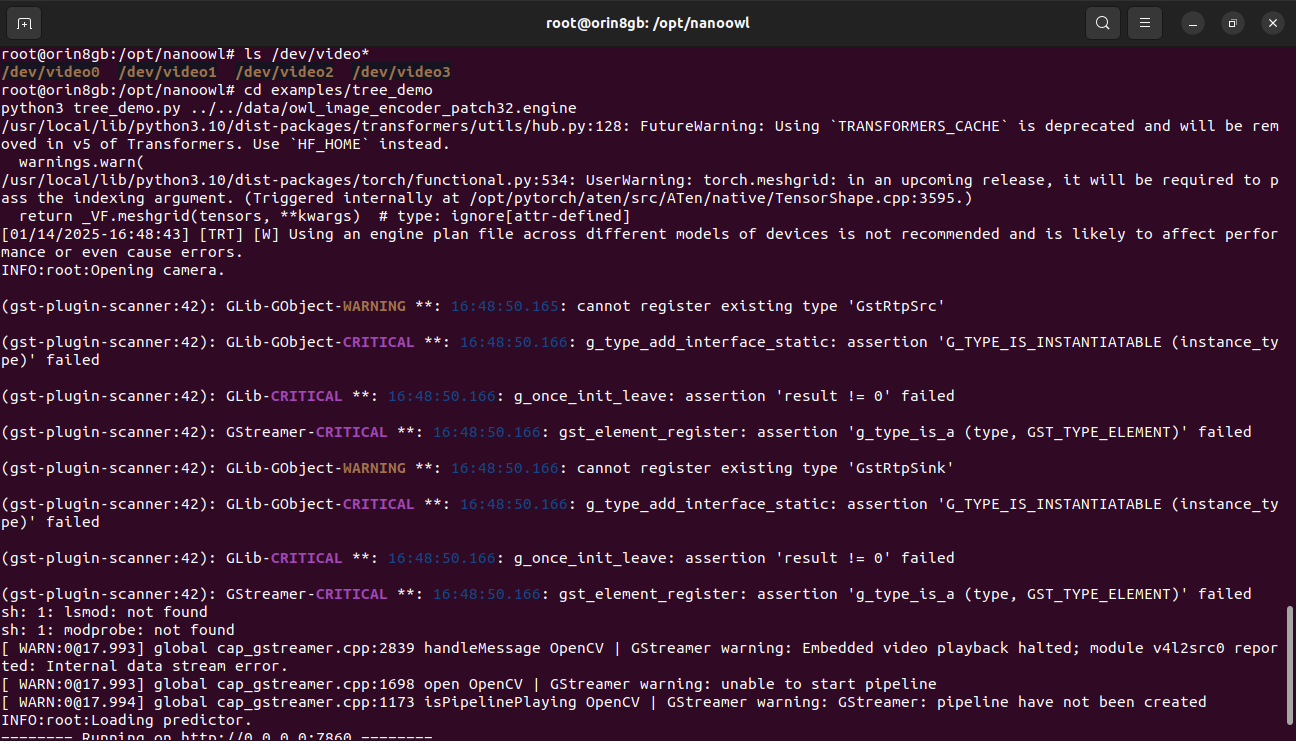
INFO:root:Opening camera.
[ WARN:0@16.220] global cap_gstreamer.cpp:2839 handleMessage OpenCV | GStreamer warning: Embedded video playback halted; module v4l2src0 reported: Internal data stream error.
[ WARN:0@16.221] global cap_gstreamer.cpp:1698 open OpenCV | GStreamer warning: unable to start pipeline
[ WARN:0@16.221] global cap_gstreamer.cpp:1173 isPipelinePlaying OpenCV | GStreamer warning: GStreamer: pipeline have not been created