Hi, I’m having a problem using SPI on a Jetson Nano, can anyone who has experienced this help me?
I enabled the use of SPI1 via jetson-io.

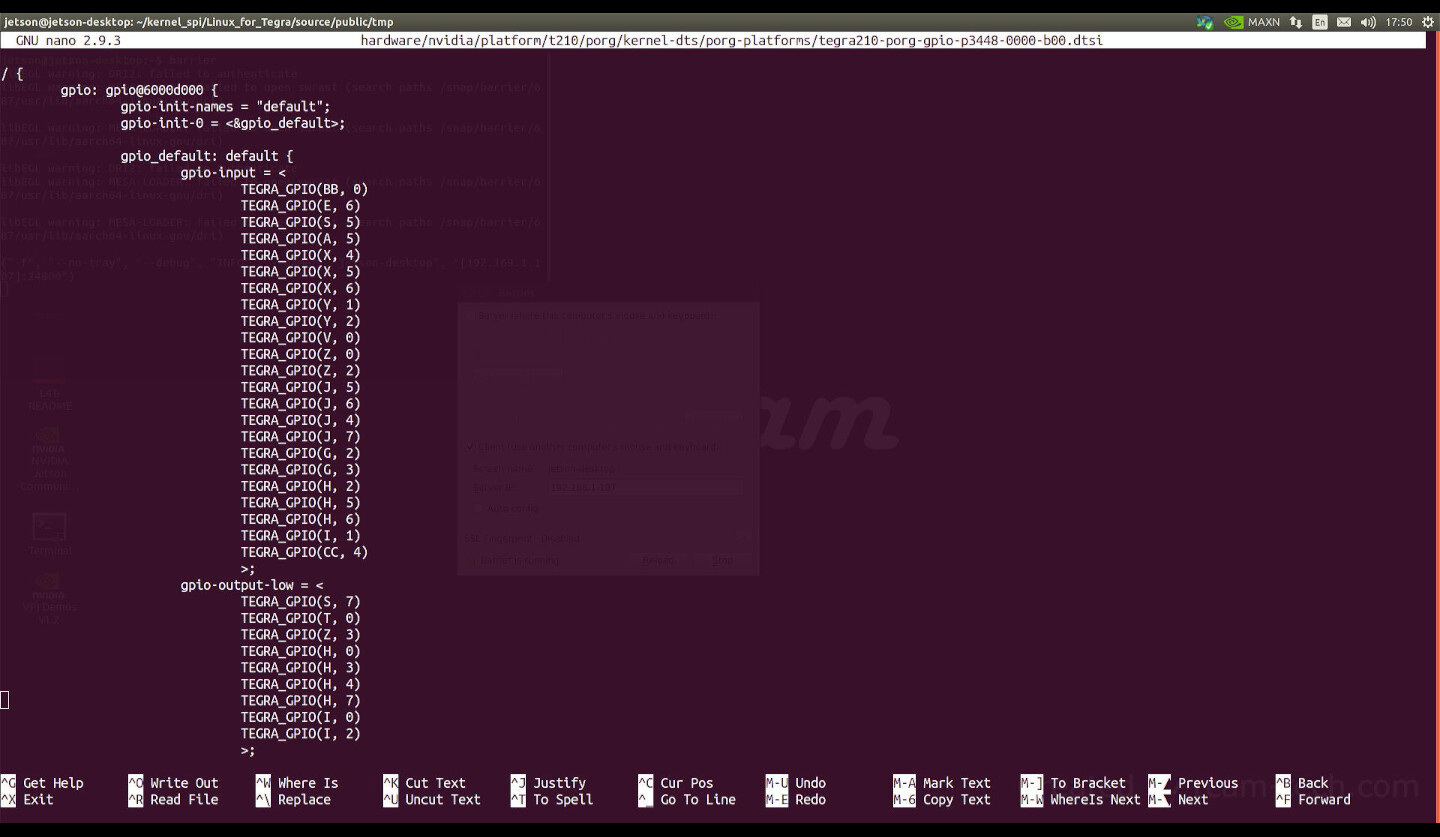
Replaced in nvidia, function rsvd1 with spi1, for all spi1__**

Loaded spidev via sudo modprobe spidev bufsiz=65563
Tested with sudo ./spidev_test -D /dev/spidev0.0 -g16 -zz (pins 19 and 21 connected in a loop)*
using device: /dev/spidev0.0
setting spi mode for read, write
setting spi bpw
setting max speed for rd/wr
spi mode: 0
bits per word: 8 bytes per word: 1
max speed: 10000000 Hz (10000 KHz)
no. runs: 1
Using seed: 0x645a676b
loop count = 0
using sequential pattern ....
transfer bytes [16]
0000: 00 01 02 03 04 05 06 07 08 09 0A 0B 0C 0D 0E 0F
transfer: Return actual transfer length: 16
receive bytes [16]
0000: 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
mismatch index 1
^^^ 00 00 00 00 00 00 00 00 00 00 00 /dev/spidev0.0: TEST FAILED !!!!! (status:-1)
Checked dmesg | grep -i kernel

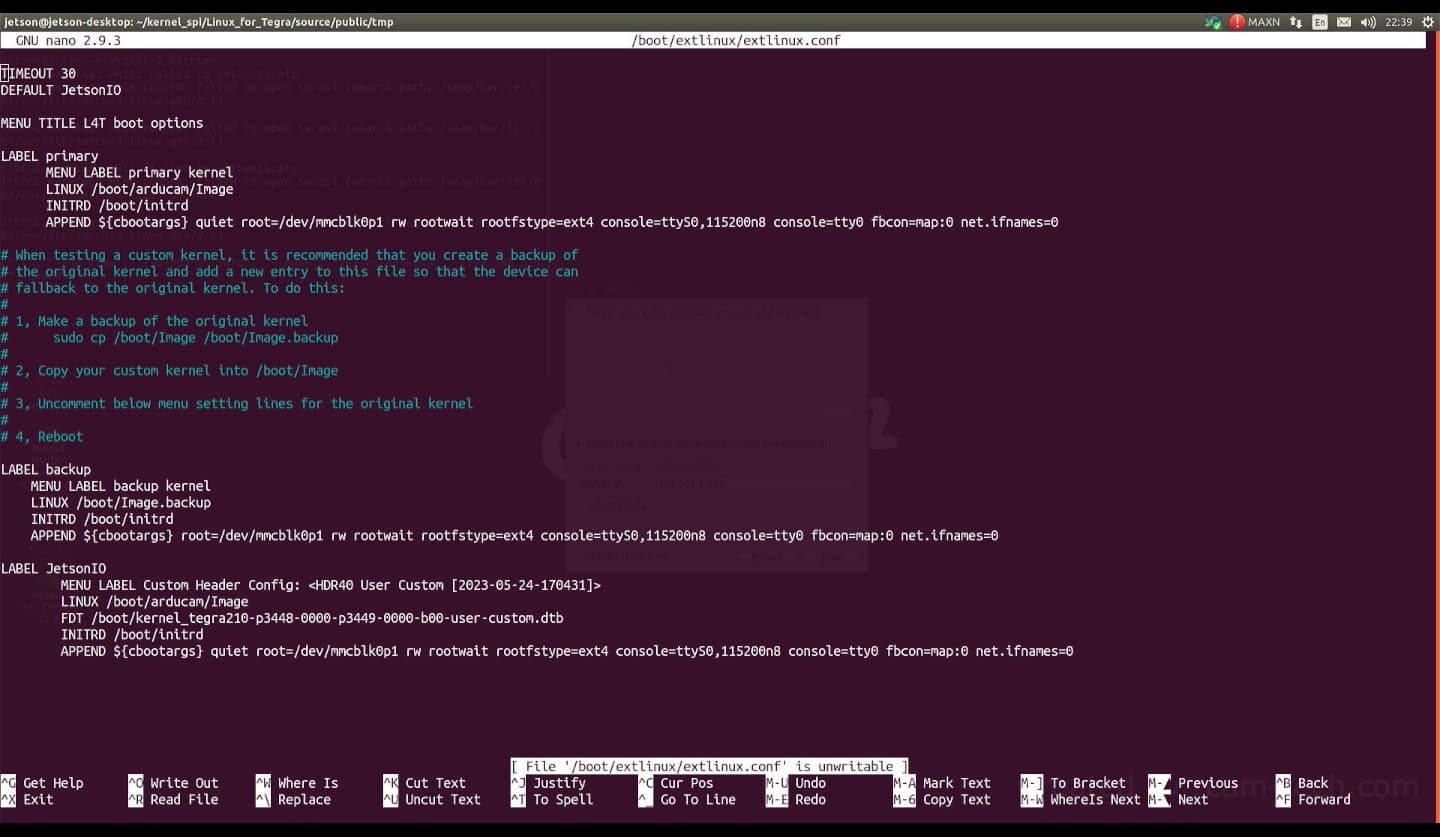
Checked sudo cat /boot/extlinux/extlinux.conf
TIMEOUT 30
DEFAULT JetsonIO
MENU TITLE L4T boot options
LABEL primary
MENU LABEL primary kernel
LINUX /boot/arducam/Image
INITRD /boot/initrd
APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0
# When testing a custom kernel, it is recommended that you create a backup of
# the original kernel and add a new entry to this file so that the device can
# fallback to the original kernel. To do this:
#
# 1, Make a backup of the original kernel
# sudo cp /boot/Image /boot/Image.backup
#
# 2, Copy your custom kernel into /boot/Image
#
# 3, Uncomment below menu setting lines for the original kernel
#
#4, Reboot
# LABEL backup
# MENU LABEL backup kernel
# LINUX /boot/Image.backup
# INITRD /boot/initrd
# APPEND ${cbootargs}
LABEL JetsonIO
MENU LABEL Custom Header Config: <HDR40 User Custom [2023-05-08-002158]>
LINUX /boot/arducam/Image
FDT /boot/kernel_tegra210-p3448-0000-p3449-0000-b00-user-custom.dtb
INITRD /boot/initrd
APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0
Here is the result of running cat /etc/nv_tegra_release
# R32 (release), REVISION: 7.3, GCID: 31982016, BOARD: t210ref, EABI: aarch64, DATE: Tue Nov 22 17:30:08 UTC 2022
Also checked sudo cat /sys/kernel/debug/tegra_gpio and it seems to be a problem with this, because the result does not match the examples in similar threads on the forum, but I can’t figure out how to fix it