However, when I start the slam_toolbox with ros2 launch slam_toolbox online_async_launch.py and manually teleoperate the robot around the scene in Isaac Sim using my keyboard, the Nova Carter robot leaves regular obstacle marks behind as it moves.
back_2d_lidar
/‾\
Carter Top Enclosure
\_/
front_2d_lidar
What is the correct way to disregard some of the angles from the front_2d_lidar in Isaac ROS applications? Especially when integrating them with third-party ROS packages.
Hey @dsonmez! According to your information, it seems to be related to the parameters you use in slam_toolbox. Could you please attach the config file you use for slam_toolbox? I suspect it is related to the min_laser_range(link).
Hey @zhengwang, thank you for your interest. You’re right, I also played with that value but it appears it doesn’t care what value I put for the min_laser_range. You can find my modified mapper_params_online_async.yaml file here (yaml file upload is not permitted):
slam_toolbox:
ros__parameters:
# Plugin params
solver_plugin: solver_plugins::CeresSolver
ceres_linear_solver: SPARSE_NORMAL_CHOLESKY
ceres_preconditioner: SCHUR_JACOBI
ceres_trust_strategy: LEVENBERG_MARQUARDT
ceres_dogleg_type: TRADITIONAL_DOGLEG
ceres_loss_function: None
# ROS Parameters
odom_frame: odom
map_frame: map
base_frame: base_link # Changed this for the Isaac Sim odometry topic name
scan_topic: /scan
use_map_saver: true
mode: mapping #localization
# if you'd like to immediately start continuing a map at a given pose
# or at the dock, but they are mutually exclusive, if pose is given
# will use pose
#map_file_name: test_steve
# map_start_pose: [0.0, 0.0, 0.0]
#map_start_at_dock: true
debug_logging: false
throttle_scans: 1
transform_publish_period: 0.02 #if 0 never publishes odometry
map_update_interval: 5.0
resolution: 0.05
min_laser_range: 5.0
max_laser_range: 20.0 #for rastering images
minimum_time_interval: 0.5
transform_timeout: 0.2
tf_buffer_duration: 30.
stack_size_to_use: 40000000 #// program needs a larger stack size to serialize large maps
enable_interactive_mode: true
# General Parameters
use_scan_matching: true
use_scan_barycenter: true
minimum_travel_distance: 0.5
minimum_travel_heading: 0.5
scan_buffer_size: 10
scan_buffer_maximum_scan_distance: 10.0
link_match_minimum_response_fine: 0.1
link_scan_maximum_distance: 1.5
loop_search_maximum_distance: 3.0
do_loop_closing: true
loop_match_minimum_chain_size: 10
loop_match_maximum_variance_coarse: 3.0
loop_match_minimum_response_coarse: 0.35
loop_match_minimum_response_fine: 0.45
# Correlation Parameters - Correlation Parameters
correlation_search_space_dimension: 0.5
correlation_search_space_resolution: 0.01
correlation_search_space_smear_deviation: 0.1
# Correlation Parameters - Loop Closure Parameters
loop_search_space_dimension: 8.0
loop_search_space_resolution: 0.05
loop_search_space_smear_deviation: 0.03
# Scan Matcher Parameters
distance_variance_penalty: 0.5
angle_variance_penalty: 1.0
fine_search_angle_offset: 0.00349
coarse_search_angle_offset: 0.349
coarse_angle_resolution: 0.0349
minimum_angle_penalty: 0.9
minimum_distance_penalty: 0.5
use_response_expansion: true
I even used the pointcloud_to_laserscan ROS package to publish /front_3d_lidar/scan topic, but it didn’t work.
Do you have any ideas on which parts can be used from nova_carter_navigation.yaml in this case? I see the robot’s footprint is on that configuration but not the min_laser_range, so it has to be something different.
Have you tried launching lidar_mapping.launch.py (link)?
In this launch file, it uses the params/nova_carter_navigation.yaml as the param file. But in params/nova_carter_navigation.yaml, the min_laser_range is not specified so you need to add it into that file yourself. Otherwise, it will just use a default value.
You can also pass an argument for lidar_mapping_parameters_path with the param file created by yourself when you launch lidar_mapping.
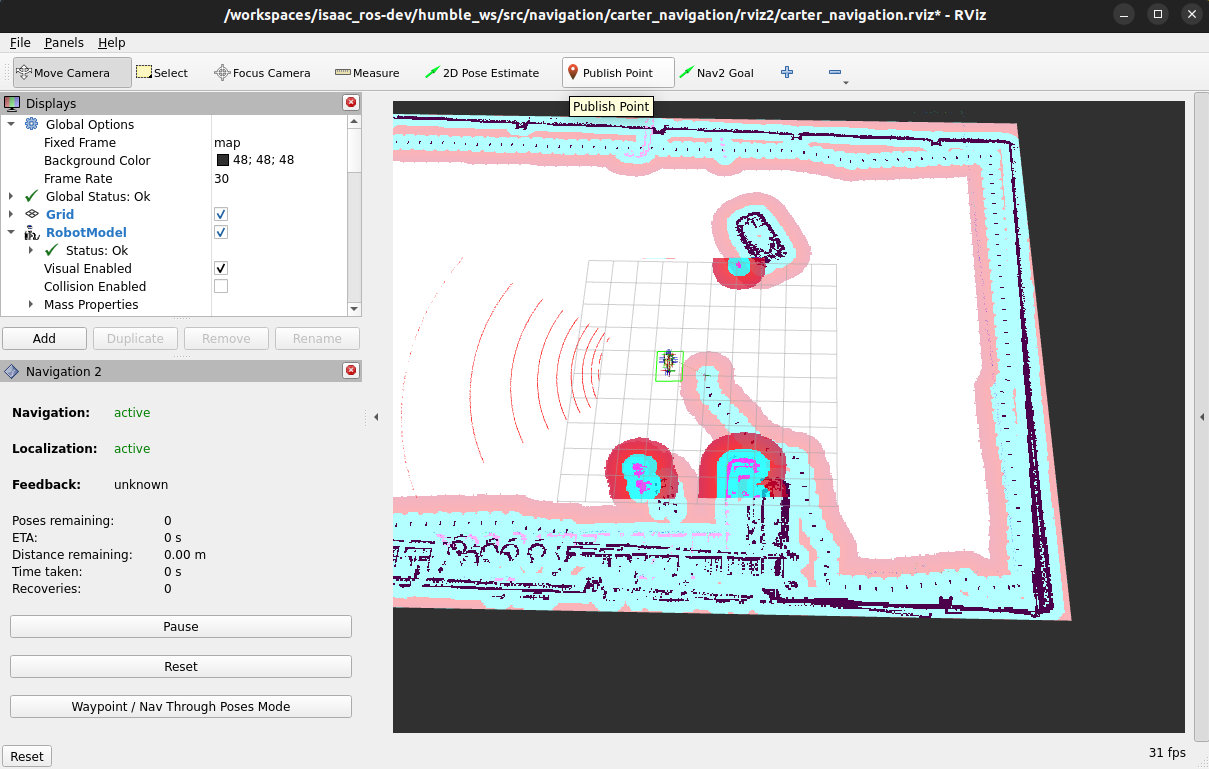
I’ve included min_laser_range: 0.0 setting to the nova_carter_navigation/params/nova_carter_navigation.yaml and launched lidar_mapping.launch.py with mode:=simulation argument:
With all these, I’m able to get a 3D model of the Nova Carter on the Rviz but I can not get the mapping areas except those weird black and white dots left behind the robot.