Hi,
I am checking for my RL environment to get point cloud data that I asked before (link).
There is a Lidar at each environment but, the error occurred.
During office hour yesterday, Kelly said it could be fixed kit file by adding some extensions at apps folder.
I am trying to understand, but I’m still lost. Could you please tell me more about this part or help me solve it?
Thanks
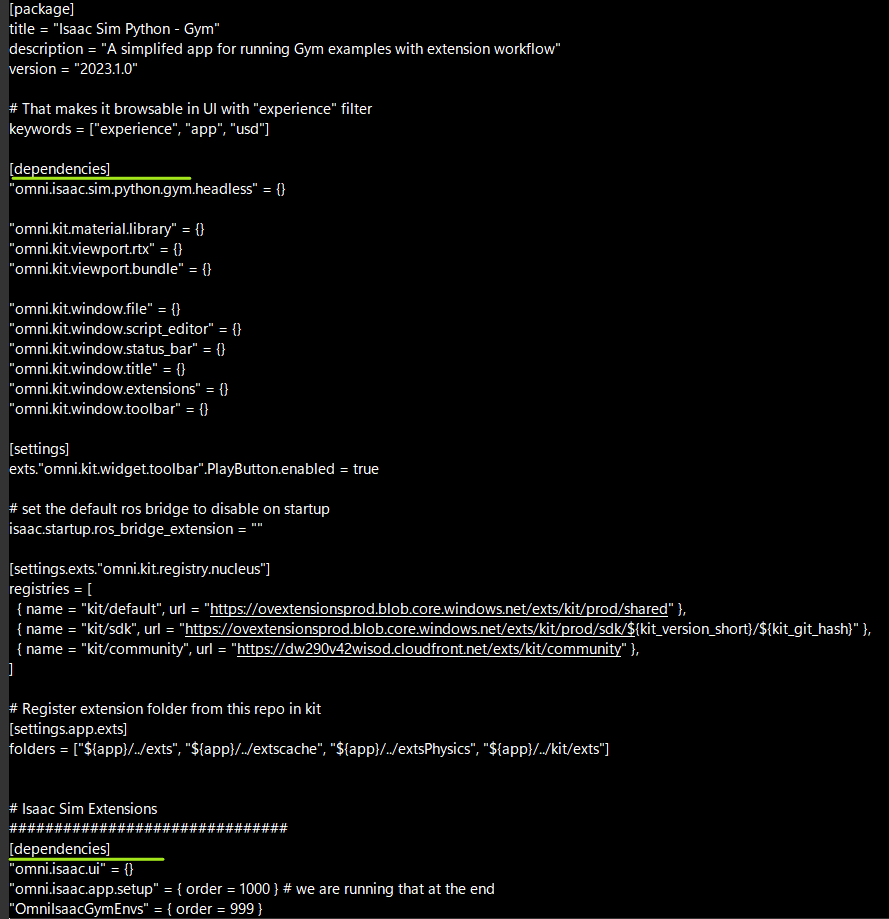
@psh9002 my understanding is to modify the kit file used by gym and append the proper dependencies (presumably the one required by rotating lidar physx). since Mayank did mention physx lidar might have gotten deprecated in favor of rtx lidar.
the location of the the kit file should be in the Isaac Sim installation directory (for all versions):
- Windows -
%userprofile%\AppData\Local\ov\pkg\isaac_sim-2023.1.0-hotfix.1\apps
- Linux -
~/.local/share/ov/pkg/isaac_sim-2023.1.0-hotfix.1/apps
the next part for me isn’t clear because i don’t do much RL myself. there seems to be two places where we can modify the dependencies (assuming i pulled the right kit file) and one is specifically for IS extensions:
hopefully @kellyg can help elaborate on the details for you.