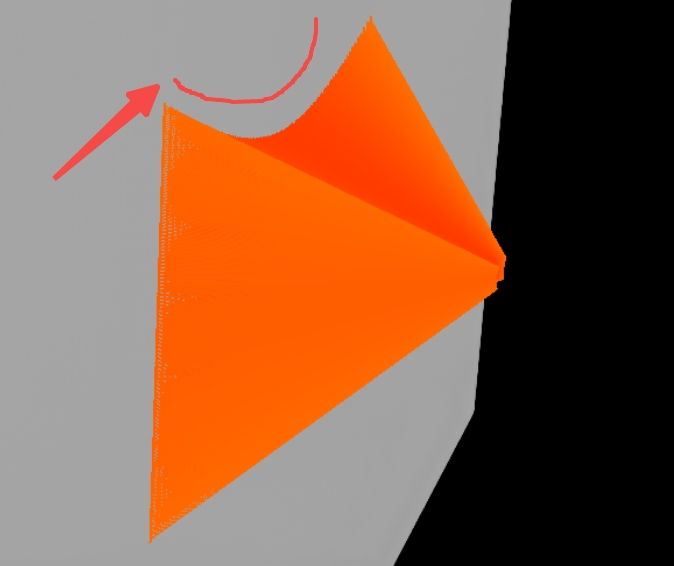
It is a pity that I encountered problems during the use of isaac sim. I want to know if “area array laser for LiDAR” can be simulated in IsaacSim. I tried to use RTX lidar and Phyx Lidar to adjust the FOV for simulation, but encountered The problem is, horizontally, it’s not a straight line, there’s a big arc.
Even if I adjust the angle, the laser emitted is not a complete rectangle。

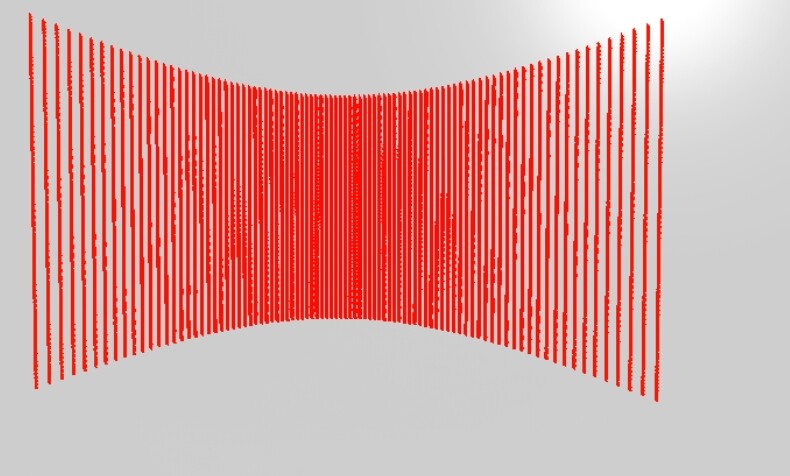
Is this point cloud the result of measuring a plane?
Please give me the information I need to reproduce it.
Thanks for your reply and help
First, let me answer the question: The picture you see now is the result of printing it on a flat wall.
I need to make an “area array laser” to acquire point cloud data (as shown in the image below), but I don’t find this type of radar in IsaacSim.

So I created a new Phyx Lidar to simulate this radar, but it has an obvious arc (in its horizontal direction) and I don’t know if there is any other way to solve this problem. The pictures below are my parameter settings.
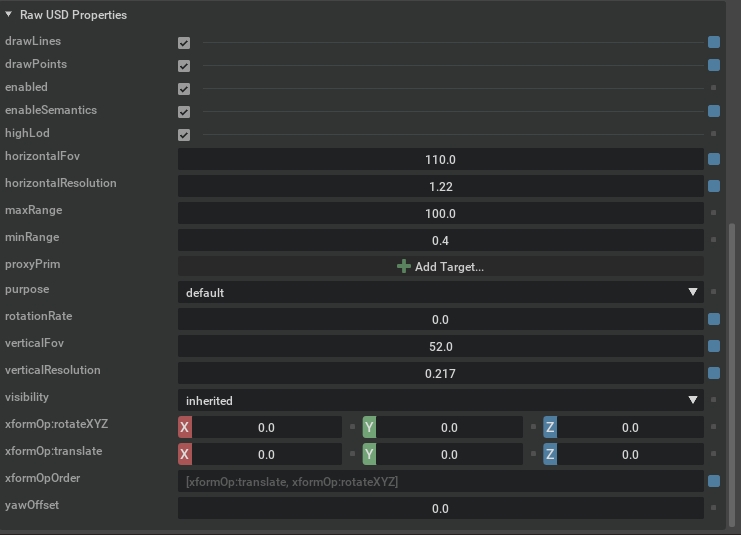
I think this lidar behaviour is not wrong because it will look like that when measured with the same vertical FOV.
Please see below image. The angles are not the same because the height of the triangles are different on the sides than on the cross section of the quadrilateral pyramid.

To implement this sensor, a solid-state Lidar configuration file must be written.
thanks for your reply
I have tried RTX Lidar and it is no different from Phyx Lidar. I configured the RTX Lidar configuration file and set its launch angle, but this arc still appears in the horizontal direction, not a rectangle.
This will lead to a result that in the horizontal direction, if the laser hits a plane, their points are not on a horizontal line, which affects the calculation of the algorithm. I want to simulate a real sensor as much as possible. My sensor is a rectangular lidar.
I would like to ask, are there any other ways to solve this problem?
Could you try to use this configuration file?
Example_Area_Array.zip (40.5 KB)
You can use this by below method.
- Put this configuration file to ${IsaacSimInstallDir}/exts/omni.isaac.sensor/data/lidar_configs/sample
- Launch Isaac Sim
- [Create]->[Isaac]->[Sensors]->[RTX Lidar]->[sample]->[Example_Area_Array]

@hijimasa
Thank you for your reply
I tried to create this RTX Lidar and it was successful, but when I tried to obtain point cloud data, it started reporting errors. It seems that there are some issues with the configuration file.
Error message:
2024-08-20 01:53:17 [12,793ms] [Error] [lidar.lidarprofilereader] Not a valid primary profile
2024-08-20 01:53:17 [12,800ms] [Error] [omni.sensors.nv.lidar.lidar_core.plugin] allocateBlob: attempt to allocate 0 sized buffer
2024-08-20 01:53:17 [12,800ms] [Error] [omni.sensors.nv.lidar.lidar_core.plugin] allocateBlob: attempt to allocate 0 sized buffer
2024-08-20 01:53:17 [12,800ms] [Error] [omni.sensors.nv.lidar.lidar_core.plugin] allocateBlob: attempt to allocate 0 sized buffer
2024-08-20 01:53:17 [12,800ms] [Error] [omni.sensors.nv.lidar.lidar_core.plugin] allocateBlob: attempt to allocate 0 sized buffer
2024-08-20 01:53:17 [12,800ms] [Error] [omni.sensors.nv.lidar.lidar_core.plugin] allocateBlob: attempt to allocate 0 sized buffer
My code:
from omni.isaac.kit import SimulationApp
simulation_app = SimulationApp({"headless": False})
import omni.usd
from omni.isaac.core.utils import prims
from omni.isaac.core.prims import XFormPrim
import math
import omni
import open3d as o3d
from omni.isaac.core.utils.stage import add_reference_to_stage
from omni.isaac.core import World
import numpy as np
import omni.replicator.core as rep
from omni.isaac.range_sensor import _range_sensor
from omni.physx import get_physx_interface
my_world = World(physics_dt=0.004,stage_units_in_meters=1.0)
stage = omni.usd.get_context().get_stage()
physx_scene = stage.GetPrimAtPath("/physicsScene")
physx_scene.GetAttribute("physxScene:timeStepsPerSecond").Set(60)
physx_scene.GetAttribute("physxScene:enableGPUDynamics").Set(True)
get_physx_interface().overwrite_gpu_setting(1)
r50_path = "/path/my.usd"
add_reference_to_stage(usd_path=r50_path, prim_path="/World/roborock")
my_world.reset()
stage = omni.usd.get_context().get_stage()
camera = stage.GetPrimAtPath("/World/roborock/Example_Area_Array")
render_product= rep.create.render_product(camera.GetPrimPath(), [1, 1])
annotator = rep.AnnotatorRegistry.get_annotator("RtxSensorCpuIsaacCreateRTXLidarScanBuffer")
annotator.attach(render_product)
z=0
while simulation_app.is_running():
my_world.step(render=True)
z += 1
print(z)
if my_world.is_playing():
if z % 100 == 0:
pointcloud = annotator.get_data()
print(pointcloud["data"])

It appears that self-made directories are not referenced during python execution.
Please put the configure file to ~/.local/share/ov/pkg/isaac-sim-4.1.0/exts/omni.isaac.sensor/data/lidar_configs/NVIDIA/
Below is my log.
[Warning] [omni.isaac.kit]
[Warning] [omni.isaac.kit] =========================== DEPRECATION WARNING ===========================
[Warning] [omni.isaac.kit]
[Warning] [omni.isaac.kit] Traceback (most recent call last):
[Warning] [omni.isaac.kit] File '/home/hijikata/irlab_ws/isaac-ros2-control-sample/colcon_ws/test.py', line 1
[Warning] [omni.isaac.kit] from omni.isaac.kit import SimulationApp
[Warning] [omni.isaac.kit]
[Warning] [omni.isaac.kit] Please import 'isaacsim' before importing the 'omni.isaac.kit' extension...
[Warning] [omni.isaac.kit] >>> import isaacsim
[Warning] [omni.isaac.kit] >>> from omni.isaac.kit import SimulationApp
[Warning] [omni.isaac.kit]
[Warning] [omni.isaac.kit] or get the 'SimulationApp' class directly from the 'isaacsim' module
[Warning] [omni.isaac.kit] >>> from isaacsim import SimulationApp
[Warning] [omni.isaac.kit]
[Warning] [omni.isaac.kit] ===========================================================================
[Warning] [omni.isaac.kit]
Starting kit application with the following args: ['/home/hijikata/.local/share/ov/pkg/isaac-sim-4.1.0/exts/omni.isaac.kit/omni/isaac/kit/simulation_app.py', '/home/hijikata/.local/share/ov/pkg/isaac-sim-4.1.0/apps/omni.isaac.sim.python.kit', '--/app/tokens/exe-path=/home/hijikata/.local/share/ov/pkg/isaac-sim-4.1.0/kit', '--/persistent/app/viewport/displayOptions=3094', '--/rtx/materialDb/syncLoads=True', '--/rtx/hydra/materialSyncLoads=True', '--/omni.kit.plugin/syncUsdLoads=True', '--/app/renderer/resolution/width=1280', '--/app/renderer/resolution/height=720', '--/app/window/width=1440', '--/app/window/height=900', '--/renderer/multiGpu/enabled=True', '--/app/fastShutdown=True', '--ext-folder', '/home/hijikata/.local/share/ov/pkg/isaac-sim-4.1.0/exts', '--ext-folder', '/home/hijikata/.local/share/ov/pkg/isaac-sim-4.1.0/apps', '--/physics/cudaDevice=0', '--portable']
Passing the following args to the base kit application: []
[Info] [carb] Logging to file: /home/hijikata/.local/share/ov/pkg/isaac-sim-4.1.0/kit/logs/Kit/Isaac-Sim/4.1/kit_20240820_204037.log
2024-08-20 11:40:37 [0ms] [Warning] [omni.kit.app.plugin] No crash reporter present, dumps uploading isn't available.
[0.038s] [ext: omni.kit.async_engine-0.0.0] startup
[0.404s] [ext: omni.stats-1.0.1] startup
[0.405s] [ext: omni.client-1.1.0] startup
[0.426s] [ext: omni.datastore-0.0.0] startup
[0.427s] [ext: omni.blobkey-1.1.0] startup
[0.427s] [ext: omni.ujitso.default-1.0.0] startup
[0.428s] [ext: omni.hsscclient-0.0.0] startup
[0.428s] [ext: omni.rtx.shadercache.vulkan-1.0.0] startup
[0.429s] [ext: omni.assets.plugins-0.0.0] startup
[0.431s] [ext: omni.gpu_foundation-0.0.0] startup
[0.440s] [ext: carb.windowing.plugins-1.0.0] startup
[0.446s] [ext: omni.kit.renderer.init-0.0.0] startup
|---------------------------------------------------------------------------------------------|
| Driver Version: 555.42.06 | Graphics API: Vulkan
|=============================================================================================|
| GPU | Name | Active | LDA | GPU Memory | Vendor-ID | LUID |
| | | | | | Device-ID | UUID |
| | | | | | Bus-ID | |
|---------------------------------------------------------------------------------------------|
| 0 | NVIDIA GeForce RTX 3090 | Yes: 0 | | 24822 MB | 10de | 0 |
| | | | | | 2204 | 63c31080.. |
| | | | | | b | |
|=============================================================================================|
| OS: 22.04.4 LTS (Jammy Jellyfish) ubuntu, Version: 22.04.4, Kernel: 6.5.0-15-generic
| XServer Vendor: The X.Org Foundation, XServer Version: 12101004 (1.21.1.4)
| Processor: AMD Ryzen 9 5950X 16-Core Processor | Cores: 16 | Logical: 32
|---------------------------------------------------------------------------------------------|
| Total Memory (MB): 64211 | Free Memory: 59157
| Total Page/Swap (MB): 2048 | Free Page/Swap: 2048
|---------------------------------------------------------------------------------------------|
2024-08-20 11:40:39 [1,349ms] [Warning] [gpu.foundation.plugin] IOMMU is enabled.
[1.560s] [ext: omni.kit.pipapi-0.0.0] startup
[1.561s] [ext: omni.kit.pip_archive-0.0.0] startup
[1.561s] [ext: omni.pip.compute-1.4.0] startup
[1.562s] [ext: omni.kit.telemetry-0.5.0] startup
[1.583s] [ext: omni.pip.cloud-1.1.3] startup
[1.586s] [ext: omni.isaac.core_archive-2.3.0] startup
[1.587s] [ext: omni.mtlx-0.1.0] startup
[1.587s] [ext: omni.usd.config-1.0.4] startup
[1.592s] [ext: omni.gpucompute.plugins-0.0.0] startup
[1.592s] [ext: omni.usd.libs-1.0.1] startup
[1.656s] [ext: omni.isaac.ml_archive-2.0.1] startup
[1.656s] [ext: omni.kit.loop-isaac-1.2.0] startup
[1.657s] [ext: omni.kit.test-0.0.0] startup
[1.698s] [ext: omni.appwindow-1.1.8] startup
[2.609s] [ext: omni.kit.renderer.core-1.0.1] startup
[7.525s] [ext: omni.kit.renderer.capture-0.0.0] startup
[7.527s] [ext: omni.kit.renderer.imgui-1.0.1] startup
[7.640s] [ext: omni.ui-2.23.11] startup
[7.647s] [ext: omni.kit.mainwindow-1.0.3] startup
[7.648s] [ext: carb.audio-0.1.0] startup
[7.651s] [ext: omni.uiaudio-1.0.0] startup
[7.652s] [ext: omni.kit.uiapp-0.0.0] startup
[7.652s] [ext: omni.usd.schema.geospatial-0.0.0] startup
[7.722s] [ext: omni.anim.navigation.schema-106.0.2] startup
[7.732s] [ext: omni.usd.schema.audio-0.0.0] startup
[7.734s] [ext: omni.usd.schema.semantics-0.0.0] startup
[7.740s] [ext: omni.usd.schema.anim-0.0.0] startup
[7.751s] [ext: omni.usd.schema.omnigraph-1.0.0] startup
[7.756s] [ext: omni.usd.schema.isaac-2.1.0] startup
[7.761s] [ext: omni.usd.schema.scene.visualization-2.0.2] startup
[7.762s] [ext: omni.usd.schema.physx-106.0.20] startup
[7.794s] [ext: omni.usd.schema.omniscripting-1.0.0] startup
[7.798s] [ext: omni.anim.graph.schema-106.0.2] startup
[7.803s] [ext: omni.usd.schema.forcefield-106.0.20] startup
[7.807s] [ext: omni.kit.window.popup_dialog-2.0.24] startup
[7.810s] [ext: omni.graph.exec-0.9.3] startup
[7.811s] [ext: omni.kit.widget.nucleus_connector-1.1.8] startup
[7.812s] [ext: omni.kit.usd_undo-0.1.8] startup
[7.813s] [ext: omni.kit.exec.core-0.13.2] startup
[7.814s] [ext: omni.usd_resolver-1.0.0] startup
[7.818s] [ext: omni.resourcemonitor-105.0.1] startup
[7.819s] [ext: omni.kit.actions.core-1.0.0] startup
[7.820s] [ext: omni.activity.core-1.0.1] startup
[7.822s] [ext: omni.usd.core-1.2.11] startup
[7.824s] [ext: omni.timeline-1.0.10] startup
[7.826s] [ext: omni.kit.commands-1.4.9] startup
[7.828s] [ext: usdrt.scenegraph-7.4.8] startup
[7.864s] [ext: omni.kit.audiodeviceenum-1.0.1] startup
[7.865s] [ext: omni.hydra.usdrt_delegate-7.4.7] startup
[7.880s] [ext: omni.hydra.scene_delegate-0.3.3] startup
[7.885s] [ext: omni.usd-1.11.2] startup
[7.912s] [ext: omni.kit.notification_manager-1.0.8] startup
[7.914s] [ext: omni.kit.clipboard-1.0.3] startup
[7.915s] [ext: omni.kit.widget.path_field-2.0.9] startup
[7.915s] [ext: omni.kit.collaboration.telemetry-1.0.0] startup
[7.916s] [ext: omni.kit.helper.file_utils-0.1.8] startup
[7.917s] [ext: omni.kit.widget.nucleus_info-1.0.2] startup
[7.918s] [ext: omni.kit.widget.context_menu-1.2.1] startup
[7.919s] [ext: omni.kit.widget.browser_bar-2.0.10] startup
[7.919s] [ext: omni.kit.collaboration.channel_manager-1.0.11] startup
[7.920s] [ext: omni.kit.widget.filebrowser-2.10.48] startup
[7.924s] [ext: omni.kit.search_core-1.0.5] startup
[7.924s] [ext: omni.kit.widget.options_menu-1.1.4] startup
[7.926s] [ext: omni.kit.widget.searchable_combobox-1.0.6] startup
[7.927s] [ext: omni.kit.widget.search_delegate-1.0.4] startup
[7.928s] [ext: omni.ui.scene-1.9.3] startup
[7.932s] [ext: omni.kit.widget.options_button-1.0.2] startup
[7.932s] [ext: omni.kit.widget.settings-1.1.1] startup
[7.934s] [ext: omni.kit.menu.utils-1.5.27] startup
[7.943s] [ext: omni.kit.window.filepicker-2.10.34] startup
[7.952s] [ext: omni.kit.widget.prompt-1.0.7] startup
[7.952s] [ext: omni.kit.usd.layers-2.1.31] startup
[7.959s] [ext: omni.kit.window.preferences-1.5.3] startup
[7.967s] [ext: omni.kit.widget.live_session_management.ui-1.0.1] startup
[7.969s] [ext: omni.kit.collaboration.presence_layer-1.0.8] startup
[7.970s] [ext: omni.kit.widget.live_session_management-1.2.18] startup
[7.972s] [ext: omni.inspect-1.0.1] startup
[7.973s] [ext: omni.kit.widget.graph-1.12.8] startup
[7.977s] [ext: omni.kit.widget.filter-1.1.4] startup
[7.978s] [ext: omni.graph.core-2.170.3] startup
[7.980s] [ext: omni.kit.window.extensions-1.4.9] startup
[7.985s] [ext: omni.kit.hotkeys.core-1.3.3] startup
[7.985s] [ext: omni.kit.context_menu-1.8.0] startup
[7.986s] [ext: omni.mdl-52.0.1] startup
[8.002s] [ext: omni.iray.libs-0.0.0] startup
[8.007s] [ext: omni.kit.primitive.mesh-1.0.16] startup
[8.009s] [ext: omni.kit.stage_template.core-1.1.21] startup
[8.010s] [ext: omni.mdl.neuraylib-0.2.5] startup
[8.011s] [ext: omni.ujitso.processor.texture-1.0.0] startup
[8.011s] [ext: omni.kit.window.file_exporter-1.0.29] startup
[8.013s] [ext: omni.kit.stage_templates-1.2.3] startup
[8.015s] [ext: omni.volume-0.5.0] startup
[8.016s] [ext: omni.ujitso.client-0.0.0] startup
[8.017s] [ext: omni.kit.window.file_importer-1.1.11] startup
[8.018s] [ext: omni.kit.window.drop_support-1.0.2] startup
[8.018s] [ext: omni.kit.window.file-1.3.52] startup
[8.020s] [ext: omni.kit.window.content_browser_registry-0.0.6] startup
[8.021s] [ext: omni.hydra.rtx-0.2.0] startup
[8.033s] [ext: omni.kit.widget.highlight_label-1.0.2] startup
[8.033s] [ext: omni.kit.window.content_browser-2.9.14] startup
[8.045s] [ext: omni.kit.widget.stage-2.10.26] startup
[8.053s] [ext: omni.kit.material.library-1.4.4] startup
[8.057s] [ext: omni.kit.hydra_texture-1.2.6] startup
[8.061s] [ext: omni.kit.viewport.legacy_gizmos-1.0.15] startup
[8.064s] [ext: omni.kit.raycast.query-1.0.5] startup
[8.070s] [ext: omni.hydra.engine.stats-1.0.2] startup
[8.073s] [ext: omni.kit.widget.searchfield-1.1.6] startup
[8.074s] [ext: omni.kit.widget.viewport-106.0.3] startup
[8.077s] [ext: omni.kit.viewport.registry-104.0.6] startup
[8.077s] [ext: omni.kit.widget.text_editor-1.0.2] startup
[8.078s] [ext: omni.kit.viewport.window-106.0.8] startup
[8.093s] [ext: omni.kit.window.property-1.11.1] startup
[8.095s] [ext: omni.usdphysics-106.0.20] startup
[8.097s] [ext: omni.graph.tools-1.78.0] startup
[8.114s] [ext: omni.kit.viewport.utility-1.0.17] startup
[8.114s] [ext: omni.kit.property.usd-3.21.28] startup
[8.121s] [ext: omni.graph-1.135.0] startup
[8.221s] [ext: omni.graph.image.core-0.3.2] startup
[8.224s] [ext: omni.graph.ui-1.70.0] startup
[8.235s] [ext: omni.graph.action_core-1.1.4] startup
[8.241s] [ext: omni.kit.window.cursor-1.1.2] startup
[8.242s] [ext: omni.graph.image.nodes-1.0.2] startup
[8.244s] [ext: omni.graph.action_nodes-1.23.0] startup
[8.250s] [ext: omni.kit.viewport.menubar.core-106.0.2] startup
[8.290s] [ext: omni.graph.nodes-1.143.0] startup
Warning: Possible version incompatibility. Attempting to load omni::fabric::IPath with version v0.2 against v0.1.
[8.303s] [ext: omni.graph.action-1.102.1] startup
[8.305s] [ext: omni.warp.core-1.2.1] startup
[8.388s] [ext: omni.syntheticdata-0.6.7] startup
[8.430s] [ext: omni.warp-1.2.1] startup
[8.455s] [ext: omni.kvdb-106.0.20] startup
[8.462s] [ext: omni.physx.foundation-106.0.20] startup
[8.463s] [ext: omni.localcache-106.0.20] startup
[8.470s] [ext: omni.convexdecomposition-106.0.20] startup
[8.478s] [ext: omni.sensors.tiled-0.0.4] startup
[8.483s] [ext: omni.physx.cooking-106.0.20] startup
[8.514s] [ext: omni.kit.viewport.actions-106.0.3] startup
[8.539s] [ext: omni.debugdraw-0.1.3] startup
[8.549s] [ext: omni.physx-106.0.20] startup
[8.565s] [ext: omni.kit.viewport.menubar.display-106.0.2] startup
[8.570s] [ext: omni.kit.manipulator.transform-104.7.5] startup
[8.576s] [ext: omni.kit.widget.toolbar-1.6.2] startup
[8.710s] [ext: omni.physx.stageupdate-106.0.20] startup
[8.713s] [ext: omni.usdphysics.ui-106.0.20] startup
[8.733s] [ext: omni.physx.commands-106.0.20] startup
[8.738s] [ext: omni.kit.manipulator.tool.snap-1.4.5] startup
[8.743s] [ext: omni.kit.property.material-1.9.4] startup
[8.746s] [ext: omni.physx.ui-106.0.20] startup
[8.770s] [ext: omni.kit.manipulator.selector-1.1.1] startup
[8.773s] [ext: omni.kit.widget.material_preview-1.0.16] startup
[8.775s] [ext: omni.kit.manipulator.viewport-107.0.0] startup
[8.776s] [ext: omni.kit.property.physx-106.0.20] startup
[8.837s] [ext: omni.physx.demos-106.0.20] startup
[8.855s] [ext: omni.kit.viewport.manipulator.transform-106.0.1] startup
[8.857s] [ext: omni.kit.graph.delegate.default-1.2.2] startup
[8.859s] [ext: omni.ui_query-1.1.2] startup
[8.860s] [ext: omni.fabric.commands-1.1.4] startup
[8.864s] [ext: omni.physx.vehicle-106.0.20] startup
[8.879s] [ext: omni.kit.manipulator.prim.core-107.0.3] startup
[8.886s] [ext: omni.kit.graph.editor.core-1.5.3] startup
[8.888s] [ext: omni.kit.ui_test-1.2.18] startup
[8.890s] [ext: omni.kit.graph.usd.commands-1.3.1] startup
[8.891s] [ext: omni.physx.camera-106.0.20] startup
[8.899s] [ext: omni.kit.manipulator.prim.fabric-106.0.1] startup
[8.901s] [ext: omni.kit.manipulator.prim.usd-106.0.1] startup
[8.903s] [ext: omni.physx.cct-106.0.20] startup
[8.911s] [ext: omni.physics.tensors-106.0.20] startup
[8.921s] [ext: omni.isaac.version-1.1.0] startup
[8.923s] [ext: omni.kit.manipulator.selection-104.0.9] startup
[8.928s] [ext: omni.kit.manipulator.prim-106.0.0] startup
[8.928s] [ext: omni.command.usd-1.0.3] startup
[8.929s] [ext: omni.physx.tensors-106.0.20] startup
[8.935s] [ext: omni.isaac.nucleus-0.3.0] startup
[8.935s] [ext: omni.kit.window.toolbar-1.6.1] startup
[8.938s] [ext: omni.kit.widget.layers-1.7.9] startup
[8.947s] [ext: omni.physx.graph-106.0.20] startup
[8.959s] [ext: omni.physx.supportui-106.0.20] startup
[8.977s] [ext: omni.physx.telemetry-106.0.20] startup
[8.984s] [ext: omni.graph.scriptnode-1.19.1] startup
[8.986s] [ext: omni.graph.ui_nodes-1.25.1] startup
Warning: Possible version incompatibility. Attempting to load omni::fabric::IPath with version v0.2 against v0.1.
[8.991s] [ext: omni.kit.numpy.common-0.1.2] startup
[8.994s] [ext: omni.physx.bundle-106.0.20] startup
[8.995s] [ext: omni.kit.window.material_graph-1.8.15] startup
[9.048s] [ext: omni.graph.bundle.action-2.0.4] startup
[9.050s] [ext: omni.isaac.dynamic_control-1.3.8] startup
[9.057s] [ext: omni.replicator.core-1.11.14] startup
2024-08-20 11:40:46 [9,122ms] [Warning] [omni.replicator.core.scripts.annotators] Annotator PostProcessDispatch is already registered, overwriting annotator template
Warp 1.2.1 initialized:
CUDA Toolkit 11.8, Driver 12.5
Devices:
"cpu" : "x86_64"
"cuda:0" : "NVIDIA GeForce RTX 3090" (24 GiB, sm_86, mempool enabled)
Kernel cache:
/home/hijikata/.cache/warp/1.2.1
[9.248s] [ext: omni.isaac.core-3.18.1] startup
[10.357s] [ext: omni.graph.visualization.nodes-2.1.1] startup
[10.366s] [ext: omni.isaac.core_nodes-1.16.1] startup
[10.380s] [ext: omni.isaac.cloner-0.8.1] startup
[10.385s] [ext: omni.isaac.ui-0.16.0] startup
[10.393s] [ext: omni.kit.graph.widget.variables-2.1.0] startup
[10.399s] [ext: omni.kit.graph.delegate.modern-1.10.6] startup
[10.406s] [ext: omni.isaac.wheeled_robots-2.3.3] startup
[10.418s] [ext: omni.isaac.gym-0.11.3] startup
[10.418s] [ext: omni.graph.window.core-1.109.0] startup
[10.442s] [ext: omni.isaac.debug_draw-1.1.0] startup
[10.447s] [ext: omni.isaac.block_world-1.0.0] startup
[10.452s] [ext: omni.graph.window.generic-1.24.0] startup
[10.465s] [ext: omni.isaac.menu-0.5.0] startup
[10.471s] [ext: omni.isaac.occupancy_map-1.0.2] startup
[10.480s] [ext: omni.importer.mjcf-1.1.1] startup
[10.491s] [ext: omni.graph.window.action-1.26.0] startup
[10.498s] [ext: omni.kit.widget.live-2.1.6] startup
[10.501s] [ext: omni.kit.actions.window-1.1.1] startup
[10.504s] [ext: omni.kit.ui.actions-1.0.1] startup
[10.505s] [ext: omni.kit.widget.cache_indicator-2.0.8] startup
[10.547s] [ext: omni.kit.hotkeys.window-1.4.5] startup
[10.552s] [ext: omni.kit.selection-0.1.4] startup
[10.554s] [ext: omni.kit.menu.common-1.1.5] startup
[10.555s] [ext: omni.sensors.nv.common-1.2.2-isaac] startup
[10.565s] [ext: omni.isaac.kit-1.13.0] startup
[10.566s] [ext: omni.kit.menu.edit-1.1.24] startup
[10.568s] [ext: omni.kit.menu.file-1.1.10] startup
[10.570s] [ext: omni.isaac.range_sensor-3.1.1] startup
[10.581s] [ext: omni.sensors.nv.materials-1.2.1-isaac] startup
[10.584s] [ext: omni.kit.property.audio-1.0.11] startup
[10.587s] [ext: omni.kit.widget.stage_icons-1.0.4] startup
[10.589s] [ext: omni.kit.property.geometry-1.3.0] startup
[10.592s] [ext: omni.kit.property.camera-1.0.6] startup
[10.594s] [ext: omni.sensors.nv.lidar-1.2.2-isaac] startup
[10.598s] [ext: omni.sensors.nv.wpm-1.2.1-isaac] startup
[10.599s] [ext: omni.hydra.scene_api-0.1.2] startup
[10.605s] [ext: omni.kit.window.stage-2.5.10] startup
[10.608s] [ext: omni.kit.property.render-1.1.1] startup
[10.609s] [ext: omni.kit.property.light-1.0.8] startup
[10.611s] [ext: omni.sensors.nv.radar-1.2.1-isaac] startup
[10.616s] [ext: omni.kit.property.transform-1.5.1] startup
[10.620s] [ext: omni.kit.menu.stage-1.2.5] startup
[10.621s] [ext: omni.kit.profiler.window-2.2.1] startup
2024-08-20 11:40:48 [10,615ms] [Warning] [omni.kit.profiler.window] remove _SpanInstance.__lt__ and use insort 'key' arg instead
[10.630s] [ext: omni.kit.property.bundle-1.2.11] startup
[10.631s] [ext: omni.kit.property.isaac-0.2.3] startup
[10.633s] [ext: omni.isaac.sensor-12.7.1] startup
[10.696s] [ext: omni.isaac.surface_gripper-1.0.1] startup
[10.702s] [ext: omni.kit.stage_column.payload-2.0.0] startup
[10.707s] [ext: omni.kit.property.layer-1.1.6] startup
[10.716s] [ext: omni.isaac.scene_blox-0.1.2] startup
[10.718s] [ext: omni.isaac.quadruped-1.4.5] startup
[10.746s] [ext: omni.isaac.manipulators-2.1.0] startup
[10.752s] [ext: omni.isaac.lula-3.0.1] startup
[10.766s] [ext: omni.kit.viewport.menubar.render-106.1.3] startup
[10.773s] [ext: omni.kit.viewport.menubar.settings-106.0.1] startup
[10.781s] [ext: omni.kit.viewport.menubar.camera-105.1.8] startup
[10.786s] [ext: omni.kit.manipulator.camera-105.0.5] startup
[10.789s] [ext: omni.isaac.motion_generation-7.1.0] startup
[10.794s] [ext: omni.kit.widget.calendar-1.0.8] startup
[10.796s] [ext: omni.kit.stage_column.variant-1.0.13] startup
[10.798s] [ext: omni.kit.viewport.bundle-104.0.1] startup
[10.798s] [ext: omni.isaac.universal_robots-0.3.5] startup
[10.799s] [ext: omni.kit.widget.extended_searchfield-1.0.28] startup
[10.808s] [ext: omni.kit.widget.timeline-105.0.1] startup
[10.812s] [ext: omni.kit.window.commands-0.2.5] startup
[10.814s] [ext: omni.kit.window.console-0.2.12] startup
[10.823s] [ext: omni.kit.window.script_editor-1.7.6] startup
[10.825s] [ext: omni.kit.menu.create-1.0.13] startup
[10.827s] [ext: omni.kit.window.status_bar-0.1.6] startup
[10.831s] [ext: omni.rtx.window.settings-0.6.16] startup
[10.835s] [ext: omni.isaac.franka-0.4.1] startup
[10.836s] [ext: omni.kit.window.title-1.1.3] startup
[10.840s] [ext: omni.replicator.isaac-1.15.0] startup
[10.853s] [ext: omni.replicator.replicator_yaml-2.0.5] startup
[10.879s] [ext: omni.rtx.settings.core-0.6.0] startup
[10.885s] [ext: omni.isaac.cortex-0.3.8] startup
[10.886s] [ext: omni.kit.viewport.menubar.lighting-106.0.2] startup
[10.895s] [ext: semantics.schema.editor-0.3.6] startup
[10.901s] [ext: semantics.schema.property-1.0.3] startup
[10.906s] [ext: omni.kit.viewport.rtx-104.0.1] startup
[10.909s] [ext: omni.isaac.utils-1.0.1] startup
[10.913s] [ext: omni.isaac.cortex.sample_behaviors-1.0.5] startup
[10.915s] [ext: omni.importer.urdf-1.14.1] startup
[10.957s] [ext: omni.kit.window.stats-0.1.6] startup
[10.965s] [ext: omni.isaac.sim.python-4.1.0] startup
[10.967s] Simulation App Starting
[12.890s] app ready
[14.107s] Simulation App Startup Complete
2024-08-20 11:40:52 [14,690ms] [Warning] [rtx.rtxsensor.plugin] Using User-specified coordinate frame quaternion (0.000000, 0.000000, 0.000000, 1.000000) in RTXSensor
[[ 2.362233 2.4800754 -1.1511266]
[ 2.3567665 2.4713457 -1.1352452]
[ 2.3699927 2.4823887 -1.1317222]
...
[ 2.3762798 -2.4916909 1.1319554]
[ 2.362765 -2.4778156 1.1386654]
[ 2.3678925 -2.4832537 1.1494285]]
[[ 2.3781385 2.4917624 -1.1550858]
[ 2.3759599 2.4935138 -1.1444649]
[ 2.356481 2.4715626 -1.1238751]
...
[ 2.3490582 -2.4619575 1.1190017]
[ 2.3511047 -2.4670208 1.1294708]
[ 2.355869 -2.4710133 1.148712 ]]
[[ 2.3601027 2.4730947 -1.1446619]
[ 2.371481 2.4860594 -1.1406666]
[ 2.3729718 2.486442 -1.1305646]
...
[ 2.3691304 -2.4863067 1.1298134]
[ 2.36855 -2.4848018 1.1386584]
[ 2.3726077 -2.4926608 1.1542995]]
[[ 2.3504734 2.4655118 -1.1438149]
[ 2.3566935 2.4702647 -1.1326813]
[ 2.36193 2.4770775 -1.1286155]
...
[ 2.3740118 -2.4876406 1.132239 ]
[ 2.3798144 -2.493936 1.1469561]
[ 2.3792772 -2.4974291 1.157496 ]]
[[ 2.3722832 2.4899921 -1.1542127]
[ 2.3792398 2.493063 -1.1446667]
[ 2.3494668 2.4656832 -1.1198965]
...
[ 2.3561146 -2.469761 1.1236917]
[ 2.3684587 -2.4882169 1.1412897]
[ 2.3788624 -2.493149 1.1576357]]
[[ 2.3764079 2.4916573 -1.1592329]
[ 2.3606582 2.4732418 -1.1376872]
[ 2.3523233 2.468279 -1.1200098]
...
test_lidar.zip (44.2 KB)
Firstly, I am using IsaacSim 2023.1.1, but for Rtx Lidar, there is not much difference.
I placed ‘Exemplar_ Area_Array. json’ in the folder ‘/home/shubao/. local/share/ov/pkg/isaac-sim-2023.1.1/exts/omni. isaac. sensor/data/lidar_configs/NVIDIA/’ and executed ‘test. py’. Unfortunately, it reported an error. The incorrect content is the image below.

Then I created a Lidar using “create ->Isaac ->Sensors ->RTX Lidar ->Nvidia ->Example - Area - Array” and saved it in USD. I executed it using test. py and encountered the same error.
Subsequently, I attempted to use ‘Simple_Sample_Solid_State. json’, created it using the following code, and saved it as USD, which is executable.
import omni.kit.commands
from pxr import Gf
import omni.replicator.core as rep
lidar_config ="Simple_Example_Solid_State"imple_Example_Solid_State”
# 1. Create The Camera
_, sensor = omni.kit.commands.execute(
"IsaacSensorCreateRtxLidar",
path="/sensor",
parent=None,
config=lidar_config,
translation=(0, 0, 1.0),
orientation=Gf.Quatd(1,0,0,0),
)
# 2. Create and Attach a render product to the camera
render_product = rep.create.render_product(sensor.GetPath(), [1, 1])
# 3. Create Annotator to read the data from with annotator.get_data()
annotator = rep.AnnotatorRegistry.get_annotator("RtxSensorCpuIsaacCreateRTXLidarScanBuffer")
annotator.attach(render_product)
# 4. Create a Replicator Writer that "writes" points into the scene for debug viewing
writer = rep.writers.get("RtxLidarDebugDrawPointCloudBuffer")
writer.attach(render_product)
Can you tell where I made a mistake?
I think that Rtx Lidar between Isaac Sim 2023.1.1 and Isaac Sim 4.1 is much difference.
For example, The startAzimuthDeg and endAzimuthDeg fields in the lidar configs were deprecated as of Isaac Sim 4.1.0.
So the configure file for Isaac Sim 4.1 may not work for Isaac Sim 2023.1.1.
I recommend you use Isaac Sim 4.1.
I do not want to make the configure file for Isaac Sim 2023.1.1 because the version will be end of life soon.
OK, I will continue to try using 4.1.0, please give me some time to upgrade
@hijimasa
I’m sorry for replying to you so late. I’ve been trying some things.
Firstly, I created RtxLidar with ‘Exemplar_ Area Array’ and used ‘rviz’ to view it.
Although it still has some curvature, it is really much better. How was it made?
Also, I don’t understand why Rviz appears to be rotating.


@hijimasa
I copied your “azimuthDeg” and “elevationDeg” and put them in isaac sim 2023.1 and successfully implemented them. How is it done? I still don’t understand

I just calculated the azimuth and elevation angle according to the geometrical conditions.
In this case:
real_elevationDeg = atan(ideal_elevationDeg) / (1 / cos(real_azimuthDeg))
I created azimuthDeg list and elevationDeg list by below script.
import math
azimuth_str_print = ""
elevation_str_print = ""
for i in range(91):
real_azimuth_angle = (i - 45.0)*1.22
for j in range(240):
ideal_elevation_angle = (j-119.5)*0.217
real_elevation_angle = math.atan(math.tan(ideal_elevation_angle*math.pi/180)/(1/math.cos(real_azimuth_angle*math.pi/180))) / math.pi * 180
azimuth_str_print = azimuth_str_print + str(format(real_azimuth_angle, '.2f'))
elevation_str_print = elevation_str_print + str(format(real_elevation_angle, '.2f'))
if not j == 239:
azimuth_str_print = azimuth_str_print + ", "
elevation_str_print = elevation_str_print + ", "
print("azimuthDeg:")
print(azimuth_str_print)
print("elevationDeg:")
print(elevation_str_print)
Based on your code, I successfully implemented the radar configuration. Thank you very much for your help.
However, unfortunately, I encountered some confusion while researching RTX Visual Materials. I created a red “cube” and set its material to “RTX Visual Materials”, with an “Rtx Sensor” emitting onto the wall.

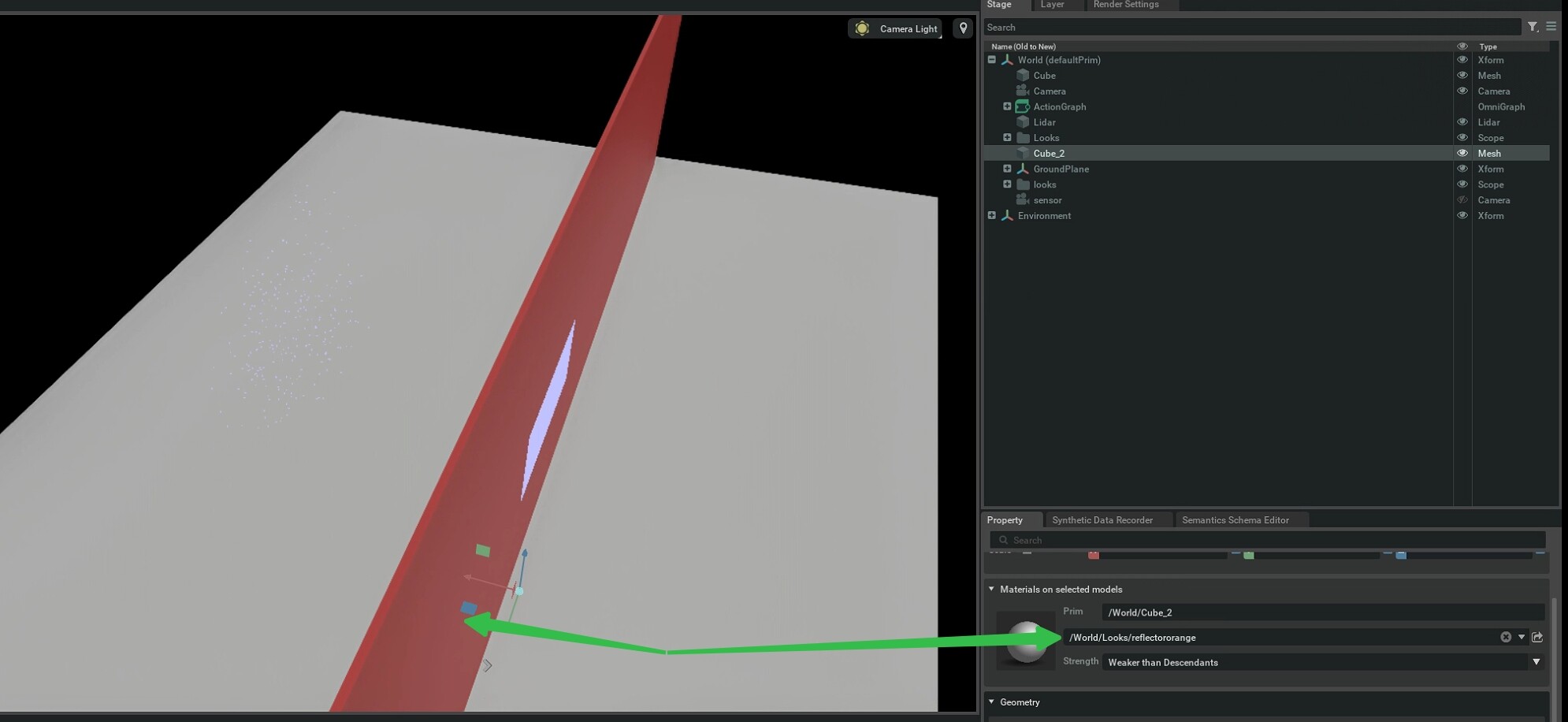
Since RTX Visual Materials is a reflective material, it should return my laser radar’s beam back, like a mirror does, to the right side.
But from what I can see now, it seems to be returning to the left (as if it passed through the cube), and it generates many points.
I don’t understand why this is happening. How can I achieve the effect of bouncing my laser beam back? I have tried many materials, but none seem to have this effect.

