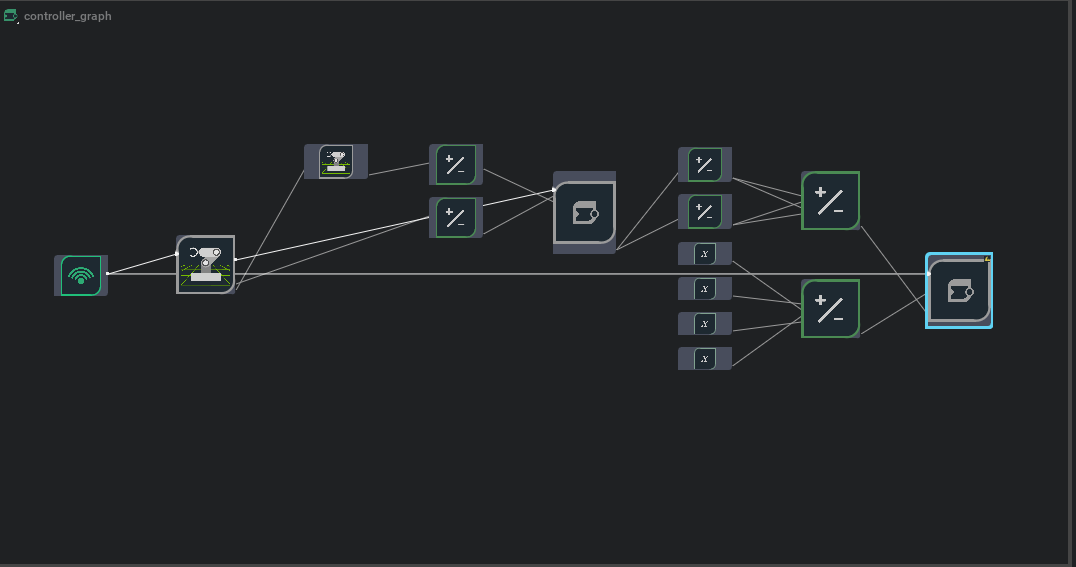
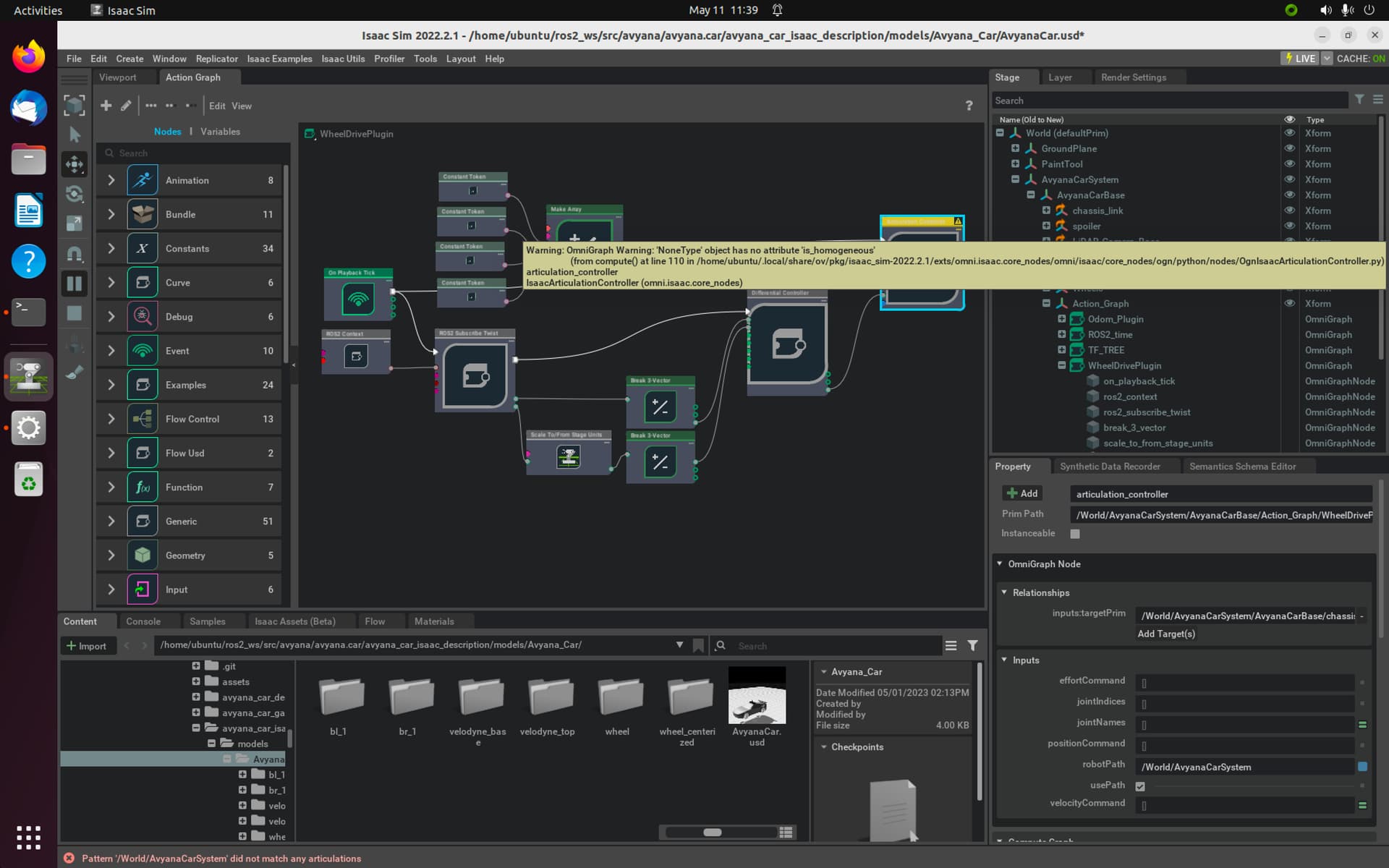
hello. I am trying to move a robot using 4-differential wheel in Isaac sim. I set the Action Graph using a script, but the error “Nontype” object has no attribute “is_homogeneous” occurs in the Articulation Controller. Is there any solution for this?
Also, when running the script, the following error also occurs.
However, when I looked at my robot, the articulation root was captured. may i know what is the problem?
Hi,
I’m having the same issue. Did you figure out how to fix this??
Regards,
Ashok Kumar.
The above problem is that the existing robot’s prim_path is not set to default_prim, resulting in an error. Can you try to set the robot’s prim as default prim?
Hi,
The prim path in case has been auto generated, and changes if I move the part/component, So I’m guessing its already default.
The vehicle moves, when I give each wheel a velocity value, but now I’m trying to setup an action graph to control it via ROS2 Bridge using HUMBLE. I’ve setup the articulation root as per the documentation, and I’m getting the same error as you.
What is your main robot?? I want to know your actuator robot
The main robot is AvyanaCarBase where the articulation root is set.
In my case, world is not default prim. You should check your prim path.