No error occurred when importing from isaac-sim, but the following isaac-sim error occurred during the “_design_scene” process before learning with ORBIT, a deep reinforcement learning framework.
2023-10-18 08:49:40 [14,231ms] [Error] [omni.physicsschema.plugin] Rigid Body of (/World/envs/env_0/Valve/base) missing xformstack reset when child of rigid body (/World/envs/env_0/Valve) in hierarchy. Simulation of multiple RigidBodyAPI's in a hierarchy will cause unpredicted results. Please fix the hierarchy or use XformStack reset.
2023-10-18 08:49:40 [14,231ms] [Error] [omni.physicsschema.plugin] Rigid Body of (/World/envs/env_0/Valve/link0) missing xformstack reset when child of rigid body (/World/envs/env_0/Valve) in hierarchy. Simulation of multiple RigidBodyAPI's in a hierarchy will cause unpredicted results. Please fix the hierarchy or use XformStack reset.
2023-10-18 08:49:40 [14,231ms] [Error] [omni.physicsschema.plugin] Rigid Body of (/World/envs/env_0/Valve/valve) missing xformstack reset when child of rigid body (/World/envs/env_0/Valve) in hierarchy. Simulation of multiple RigidBodyAPI's in a hierarchy will cause unpredicted results. Please fix the hierarchy or use XformStack reset.
2023-10-18 08:49:40 [14,250ms] [Error] [omni.physx.plugin] PhysicsUSD: CreateJoint - no bodies defined at body0 and body1, joint prim: /World/envs/env_0/Valve/joints/rootJoint
2023-10-18 08:49:40 [14,250ms] [Error] [omni.physx.plugin] PhysicsUSD: CreateJoint - no bodies defined at body0 and body1, joint prim: /World/envs/env_0/Valve/joints/link0
2023-10-18 08:49:40 [14,250ms] [Error] [omni.physx.plugin] PhysicsUSD: CreateJoint - no bodies defined at body0 and body1, joint prim: /World/envs/env_0/Valve/joints/latch_joint

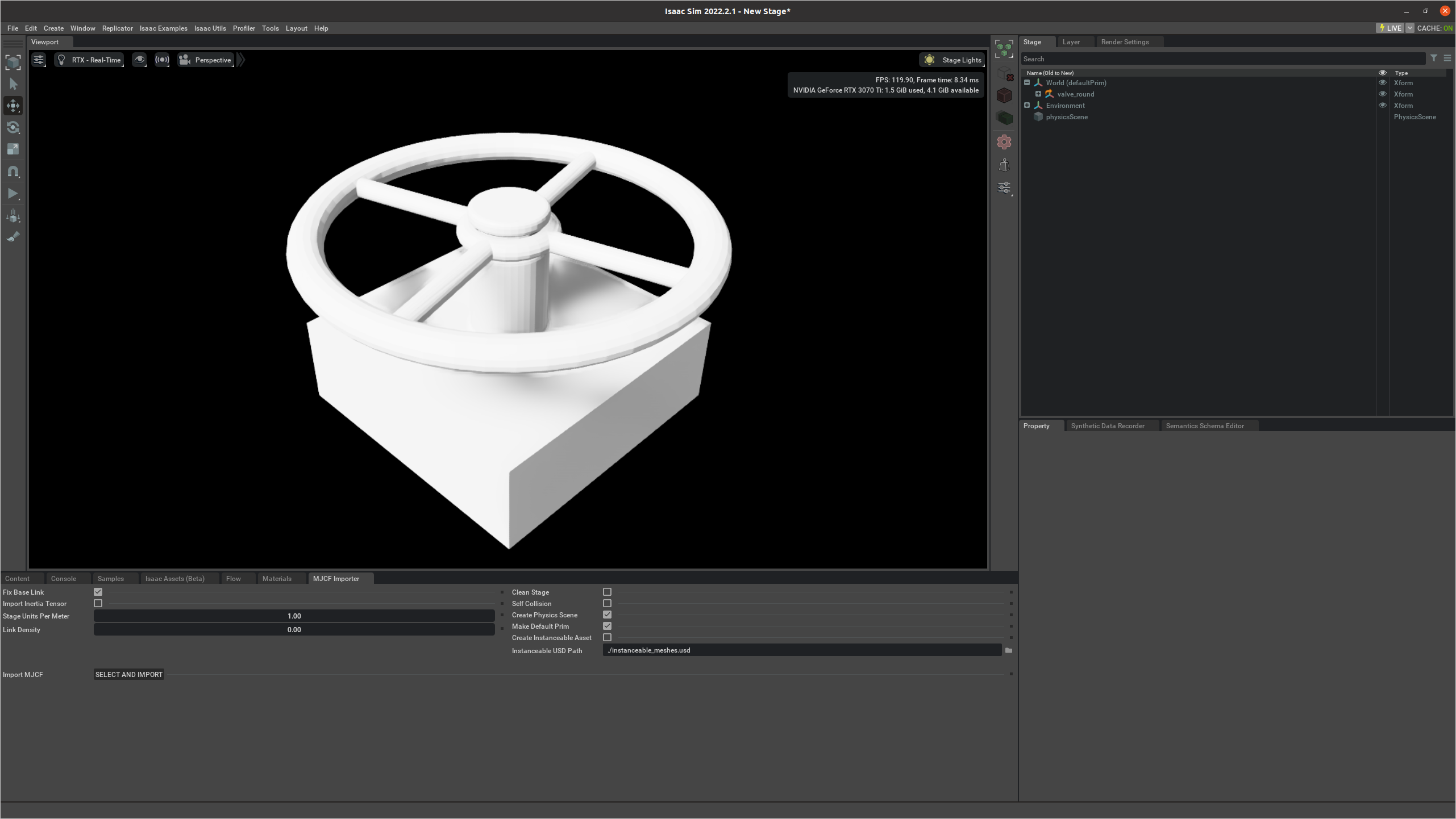
The custom usd file I want to upload is pictured below.

The prim path is also set as shown in the picture below, and when importing independently from isaac-sim, it loads normally and the simulation works well. But when I run it on ORBIT, the isaac-sim extension throws an error like this, so I’m writing this.

I would really appreciate some help!