Isaac Sim Version
o 5.0.0
Operating System
o Ubuntu 22.04
GPU Information
- Model: RTX 2060
- Driver Version:
Topic Description
Detailed Description
Trajectory Execution : I generated trajectory using Moveit2, and executing in Isaac Sim by publishing to joint_commandswith10Hz. Isaac Sim physics_dt is set to 30Hz.
Collision Object Generation : Object is generated from Isaac Sim and publish pose information to Moveit2 planning_scene. ← Assuming this part could go wrong because of meshes, but unsure to fix it.
Bug : Trajectory generated from Moveit2 making a slight collision between robot and collision object.
Screenshots or Videos
- Initial Position (No bug)
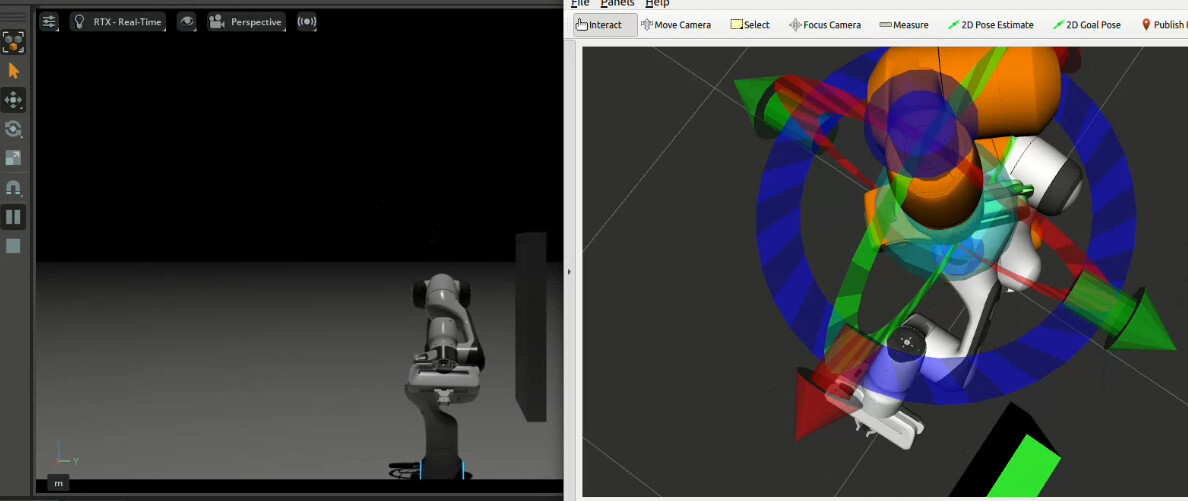
- End position (No bug)
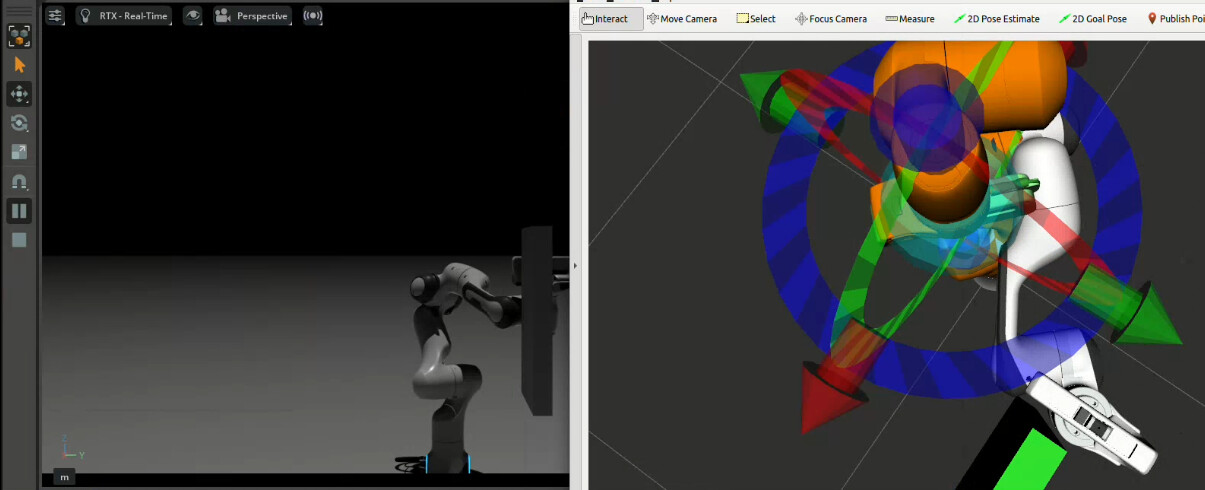
-
Collision between link6 & object (Bug)

What I’ve Tried
- Matching
joint_commandspublish rate tophysics_dtof isaac Sim. - Interpolating generated trajectory to have more waypoints.
- Set
restOffset = 0andcontactOffset = 1e-5to reduce collision detection distance. ← I thought this would solve the problem but it didn’t. - Ran the trajectory without Isaac Sim –> No collision issue happened.
Issue still persists with above trials. I’m wondering if my setup could be wrong :
Isaac Sim publishes objects to Moveit2 planning_scene --> Send goal to Moveit --> Trajectory --> Publish to execute (10Hz)
Any suggestion will helpful. Thank you!