Hi
“FrankaCabinet” doesn’t work.
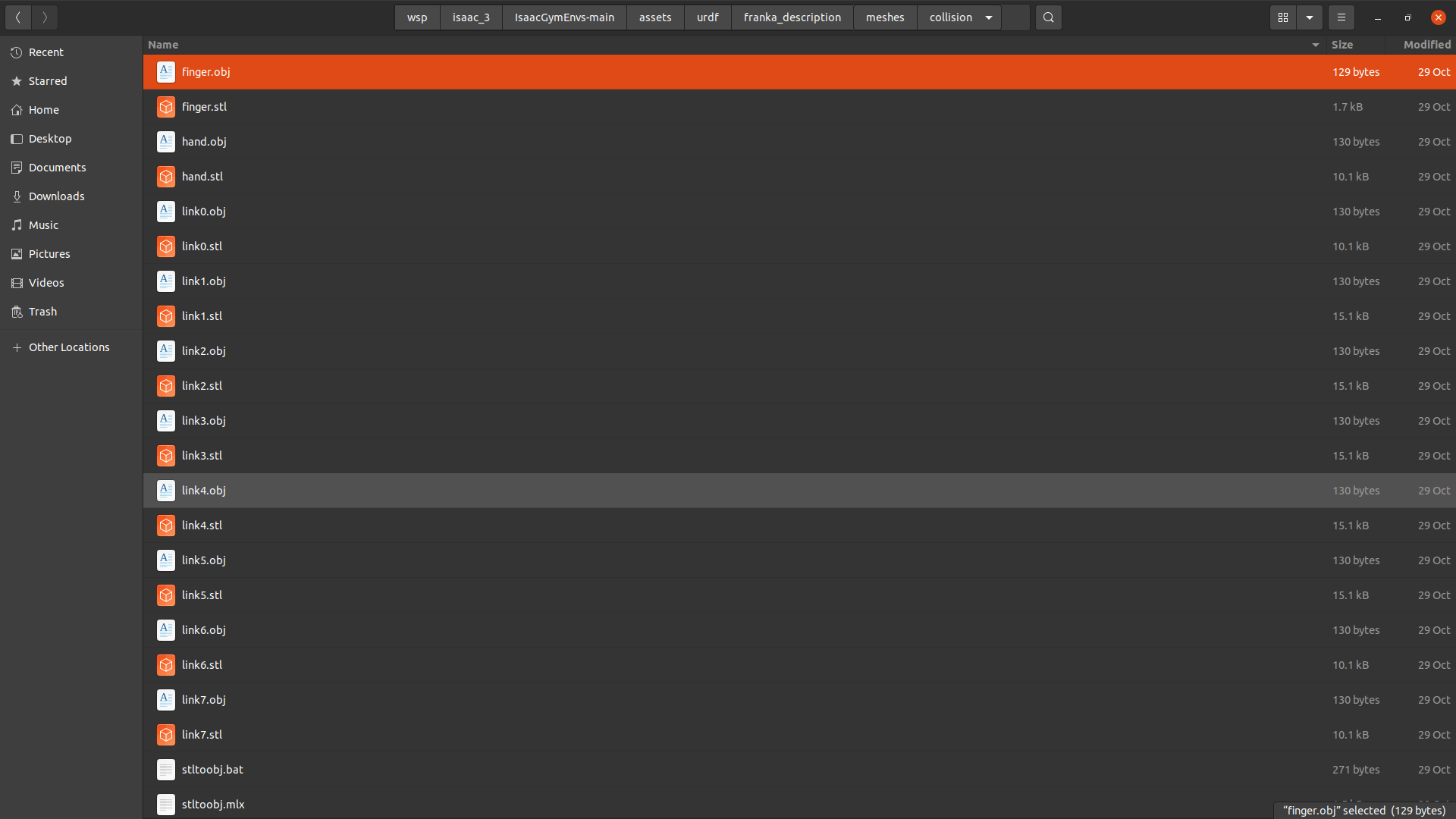
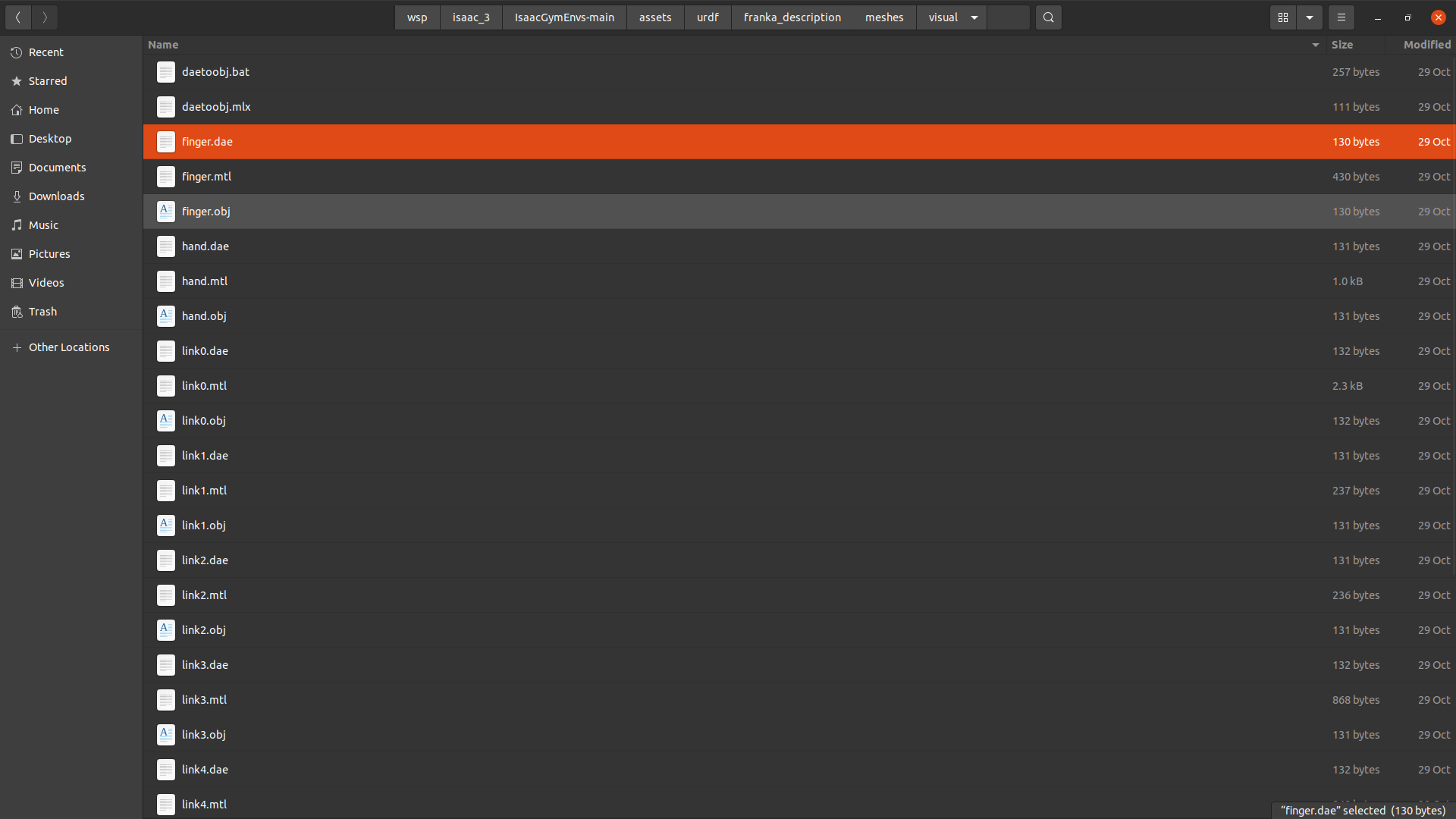
There seems to be something wrong with the “.obj” files and ".dae"files.
The file size is significantly smaller than the previous one.
(isaac) sa@Fossa:~/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs$ python train.py task=FrankaCabinet Importing module 'gym_38' (/home/sa/wsp/isaac_3/isaacgym/python/isaacgym/_bindings/linux-x86_64/gym_38.so) Setting GYM_USD_PLUG_INFO_PATH to /home/sa/wsp/isaac_3/isaacgym/python/isaacgym/_bindings/linux-x86_64/usd/plugInfo.json PyTorch version 1.10.0+cu113 Device count 1 /home/sa/wsp/isaac_3/isaacgym/python/isaacgym/_bindings/src/gymtorch Using /home/sa/.cache/torch_extensions/py38_cu113 as PyTorch extensions root... Emitting ninja build file /home/sa/.cache/torch_extensions/py38_cu113/gymtorch/build.ninja... Building extension module gymtorch... Allowing ninja to set a default number of workers... (overridable by setting the environment variable MAX_JOBS=N) ninja: no work to do. Loading extension module gymtorch... /home/sa/wsp/isaac_3/isaac/lib/python3.8/site-packages/hydra/_internal/defaults_list.py:251: UserWarning: In 'config': Defaults list is missing self`. See Changes to default composition order | Hydra for more information
warnings.warn(msg, UserWarning)
/home/sa/wsp/isaac_3/isaac/lib/python3.8/site-packages/hydra/_internal/defaults_list.py:412: UserWarning: In config: Invalid overriding of hydra/job_logging:
Default list overrides requires ‘override’ keyword.
See https://hydra.cc/docs/next/upgrades/1.0_to_1.1/defaults_list_override for more information.
deprecation_warning(msg)
task:
name: FrankaCabinet
physics_engine: physx
env:
numEnvs: 4096
envSpacing: 1.5
episodeLength: 500
enableDebugVis: False
clipObservations: 5.0
clipActions: 1.0
startPositionNoise: 0.0
startRotationNoise: 0.0
numProps: 16
aggregateMode: 3
actionScale: 7.5
dofVelocityScale: 0.1
distRewardScale: 2.0
rotRewardScale: 0.5
aroundHandleRewardScale: 0.25
openRewardScale: 7.5
fingerDistRewardScale: 5.0
actionPenaltyScale: 0.01
asset:
assetRoot: …/…/assets
assetFileNameFranka: urdf/franka_description/robots/franka_panda.urdf
assetFileNameCabinet: urdf/sektion_cabinet_model/urdf/sektion_cabinet_2.urdf
enableCameraSensors: False
sim:
dt: 0.0166
substeps: 1
up_axis: z
use_gpu_pipeline: True
gravity: [0.0, 0.0, -9.81]
physx:
num_threads: 4
solver_type: 1
use_gpu: True
num_position_iterations: 12
num_velocity_iterations: 1
contact_offset: 0.005
rest_offset: 0.0
bounce_threshold_velocity: 0.2
max_depenetration_velocity: 1000.0
default_buffer_size_multiplier: 5.0
max_gpu_contact_pairs: 1048576
num_subscenes: 4
contact_collection: 0
task:
randomize: False
train:
params:
seed: 42
algo:
name: a2c_continuous
model:
name: continuous_a2c_logstd
network:
name: actor_critic
separate: False
space:
continuous:
mu_activation: None
sigma_activation: None
mu_init:
name: default
sigma_init:
name: const_initializer
val: 0
fixed_sigma: True
mlp:
units: [256, 128, 64]
activation: elu
d2rl: False
initializer:
name: default
regularizer:
name: None
load_checkpoint: False
load_path:
config:
name: FrankaCabinet
full_experiment_name: FrankaCabinet
env_name: rlgpu
ppo: True
mixed_precision: False
normalize_input: True
normalize_value: True
num_actors: 4096
reward_shaper:
scale_value: 0.01
normalize_advantage: True
gamma: 0.99
tau: 0.95
learning_rate: 0.0005
lr_schedule: adaptive
kl_threshold: 0.008
score_to_win: 10000
max_epochs: 1500
save_best_after: 200
save_frequency: 100
print_stats: True
grad_norm: 1.0
entropy_coef: 0.0
truncate_grads: True
e_clip: 0.2
horizon_length: 16
minibatch_size: 8192
mini_epochs: 8
critic_coef: 4
clip_value: True
seq_len: 4
bounds_loss_coef: 0.0001
task_name: FrankaCabinet
experiment:
num_envs:
seed: 42
torch_deterministic: False
max_iterations:
physics_engine: physx
pipeline: gpu
sim_device: cuda:0
rl_device: cuda:0
graphics_device_id: 0
num_threads: 4
solver_type: 1
num_subscenes: 4
test: False
checkpoint:
multi_gpu: False
headless: False
Setting seed: 42
Started to train
Exact experiment name requested from command line: FrankaCabinet
/home/sa/wsp/isaac_3/isaac/lib/python3.8/site-packages/gym/spaces/box.py:73: UserWarning: WARN: Box bound precision lowered by casting to float32
logger.warn(
[Warning] [carb.gym.plugin] useGpu is set, forcing single scene (0 subscenes)
Not connected to PVD
+++ Using GPU PhysX
Physics Engine: PhysX
Physics Device: cuda:0
GPU Pipeline: enabled
MESA-INTEL: warning: Performance support disabled, consider sysctl dev.i915.perf_stream_paranoid=0
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/link0.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/link0.dae
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/link1.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/link1.dae
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/link2.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/link2.dae
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/link3.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/link3.dae
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/link4.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/link4.dae
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/link5.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/link5.dae
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/link6.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/link6.dae
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/link7.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/hand.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/link7.dae
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/hand.dae
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/finger.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/finger.dae
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/collision/finger.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/franka_description/meshes/visual/finger.dae
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/sektion_convexdecomposition0.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/sektion_convexdecomposition1.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/sektion_convexdecomposition2.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/sektion_convexdecomposition3.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/sektion_convexdecomposition4.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/sektion_convexdecomposition5.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/sektion_convexdecomposition6.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/door_left.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/door_left_nob.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/door_right.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/door_right_nob.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_convexdecomposition.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_handle_convexdecomposition.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_handle.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_convexdecomposition0.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_convexdecomposition1.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_convexdecomposition2.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_convexdecomposition3.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_convexdecomposition4.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_convexdecomposition5.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_convexdecomposition6.obj
[Error] [carb.gym.plugin] Could not load collision mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_handle_convexdecomposition.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer.obj
[Error] [carb.gym.plugin] Could not load visual mesh /home/sa/wsp/isaac_3/IsaacGymEnvs-main/isaacgymenvs/tasks/…/…/assets/urdf/sektion_cabinet_model/meshes/drawer_handle.obj
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
[Warning] [carb.gym.plugin] Unsupported shape encountered in addCollisionAttachementsToAsset
num franka bodies: 10
num franka dofs: 9
num cabinet bodies: 5
num cabinet dofs: 4
Segmentation fault (core dumped)