Hi there,
I noticed a strange phenomenon while trainning robot with isaac gym. I find that robot’s frame can not change throughout the trainning. It seems they fixed in space at their initial positions. I don’t know if it was a mistake.








Hi @1062033103
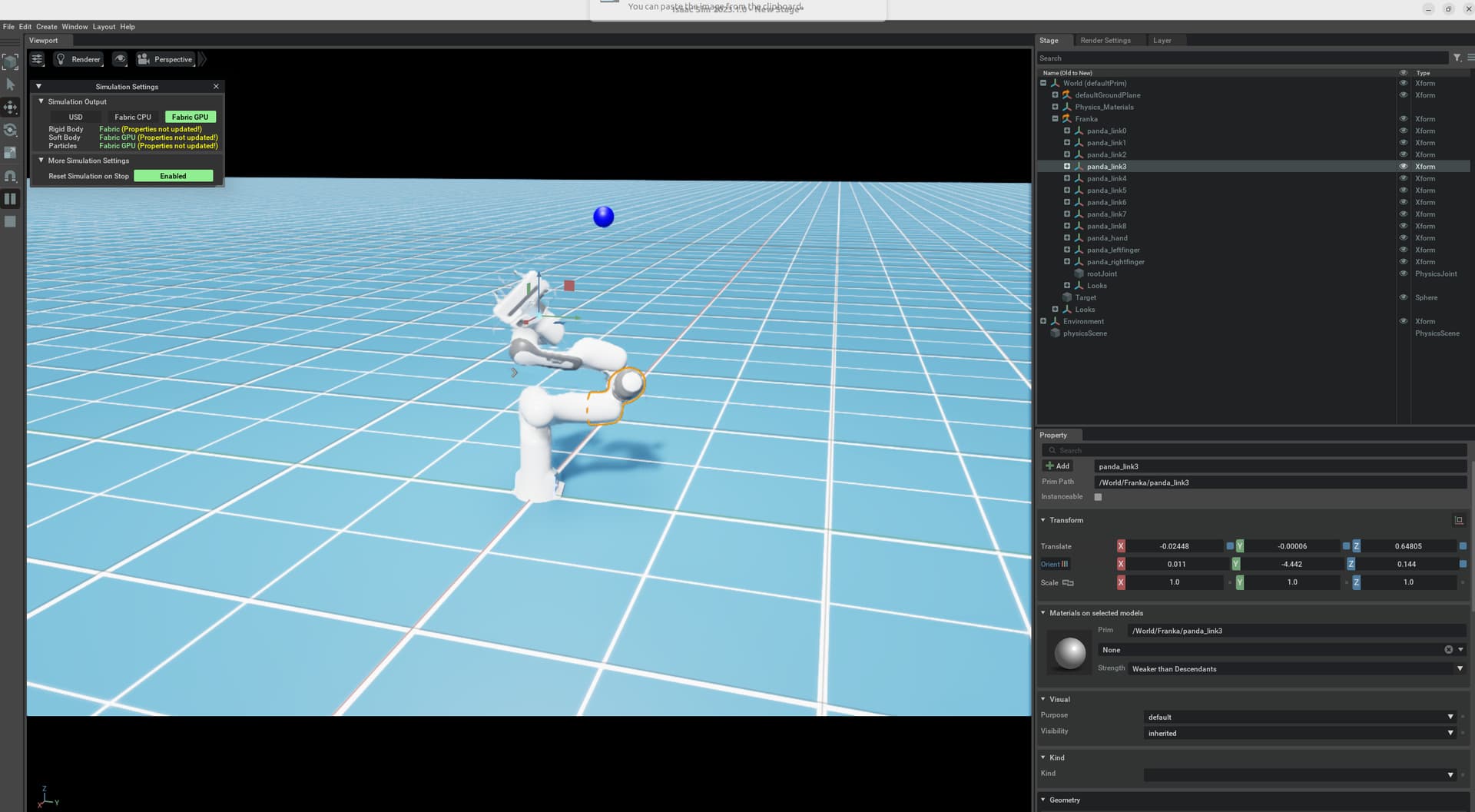
For Omniverse Isaac Gym, the fabric extension is enabled by default
Some Fabric notes:
- Using Fabric means that the data are not available in USD. This will cause USD based functionality to not work. For example debug visualization of physics colliders wont work anymore, because the transformations are not synchronized.
- Using a python script to update and get USD state wont work because USD does not have current transformation information.
Hi @toni.nv :
Does that mean although I can’t read and manipulate robot state from usd, it’s still possible for me to encapsulate the robot by class Articluation and then read the robot state through the Articluation methods?
Thank you again.
Hi @1062033103
Yes, via the Articulation or ArticulationView classes you can read the state and control the robot regardless of whether fabric is enabled or not
OK, I get it. Thank you very much!